Robot Pose
Overview
To define different poses for the Lexium Cobot Arm, go to .
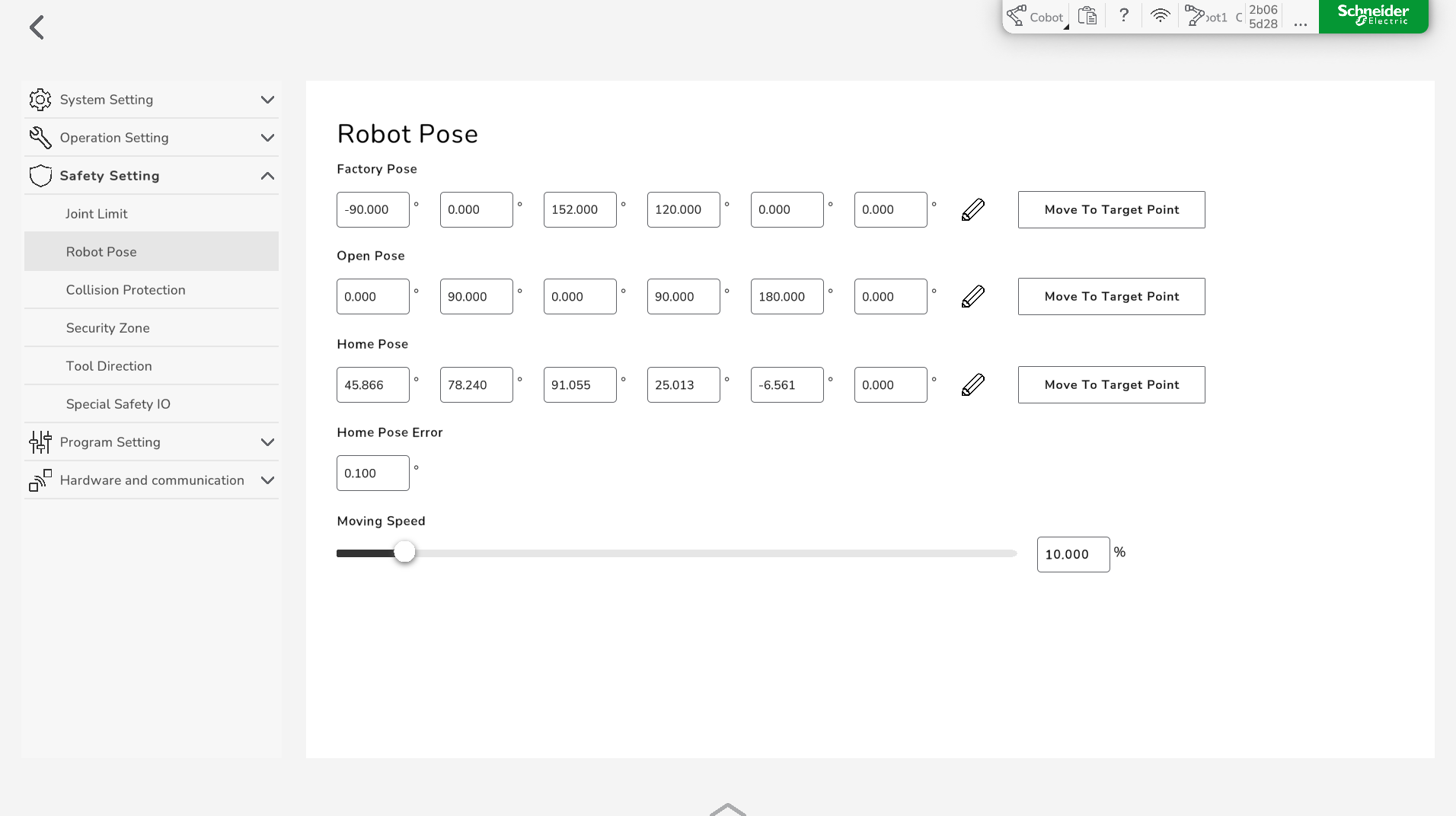
You can use and adjust three different poses for the Lexium Cobot Arm:
-
Factory Pose: folding positions of the Lexium Cobot Arm in delivery condition.
-
Open Pose: zero position for each joint.
-
Home Pose: initial position of the Lexium Cobot Arm. You can define the Home Pose in the software and reach the home position through the Home button on the Control Stick.
Home Pose Error: Acceptable deviation from the designated Home Pose.
Moving to a Pose
|
Step |
Action |
|---|---|
|
1 |
Power on and enable the Lexium Cobot Arm. |
|
2 |
Click and hold Move To Target Point at the corresponding pose until the prompt Robot has reached the position is displayed.
NOTE: To adjust the moving speed of the Lexium Cobot Arm, use the Moving Speed slider. 100% equals 250 mm/s (9.8 in/s).
|
Setting the Lexium Cobot Arm Pose
|
Step |
Action |
|---|---|
|
1 |
Power on and enable the Lexium Cobot Arm. |
|
2 |
Click the Edit button in the Robot Pose dialog box of the pose to be edited: Result: The Manual Operation interface is displayed. 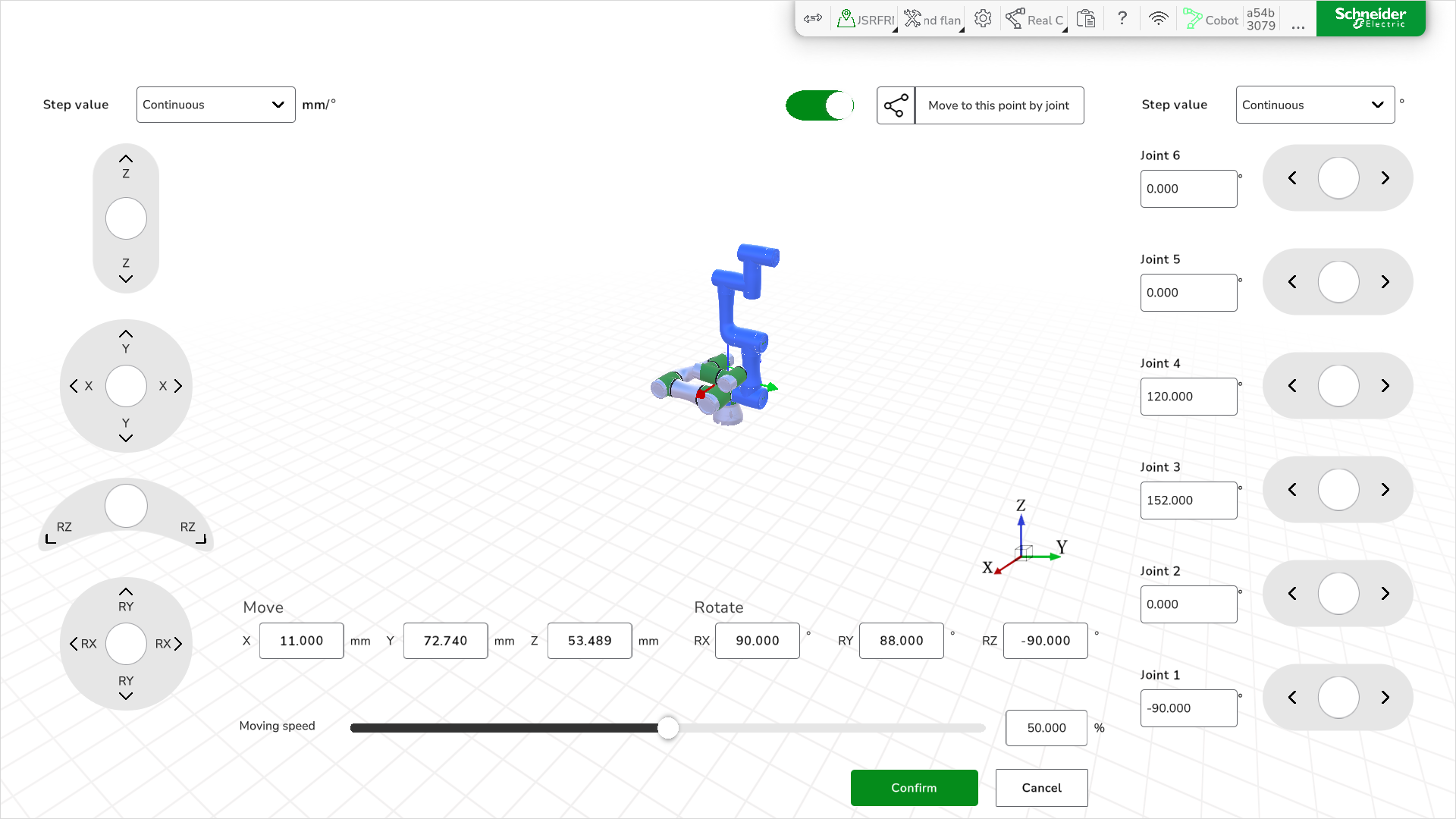
|
|
3 |
Set the pose and click Confirm. Result: The pose definition is set. |