Emergency Stop Safety Functions
Functional Description
The Lexium Cobot system provides the following options to implement an emergency stop:
-
Emergency stop pushbutton on the Lexium Cobot Control Stick (SF1).
-
External emergency stop safety-related device (for example, pushbuttons, light curtains, safety-related mats or other such device) connected to CN8 at the Lexium Cobot Cabinet Controller or to the emergency stop interface connector at the Lexium Cobot Compact Controller (SF2).
-
Additional emergency stop safety-related device connected to a two-channel safety-related digital input at the Lexium Cobot Controllers, if configured in EcoStruxure Cobot Expert (SF15).
Connected emergency stops can be used together. When one of the emergency stops is requested, the Lexium Cobot system stops the Lexium Cobot Arm motion, engages the internal brake, and powers off the Lexium Cobot Arm after a maximum stopping time of 250 ms (stop category 1 in accordance with IEC 60204-1). The executed program of the Lexium Cobot system is stopped and terminated.
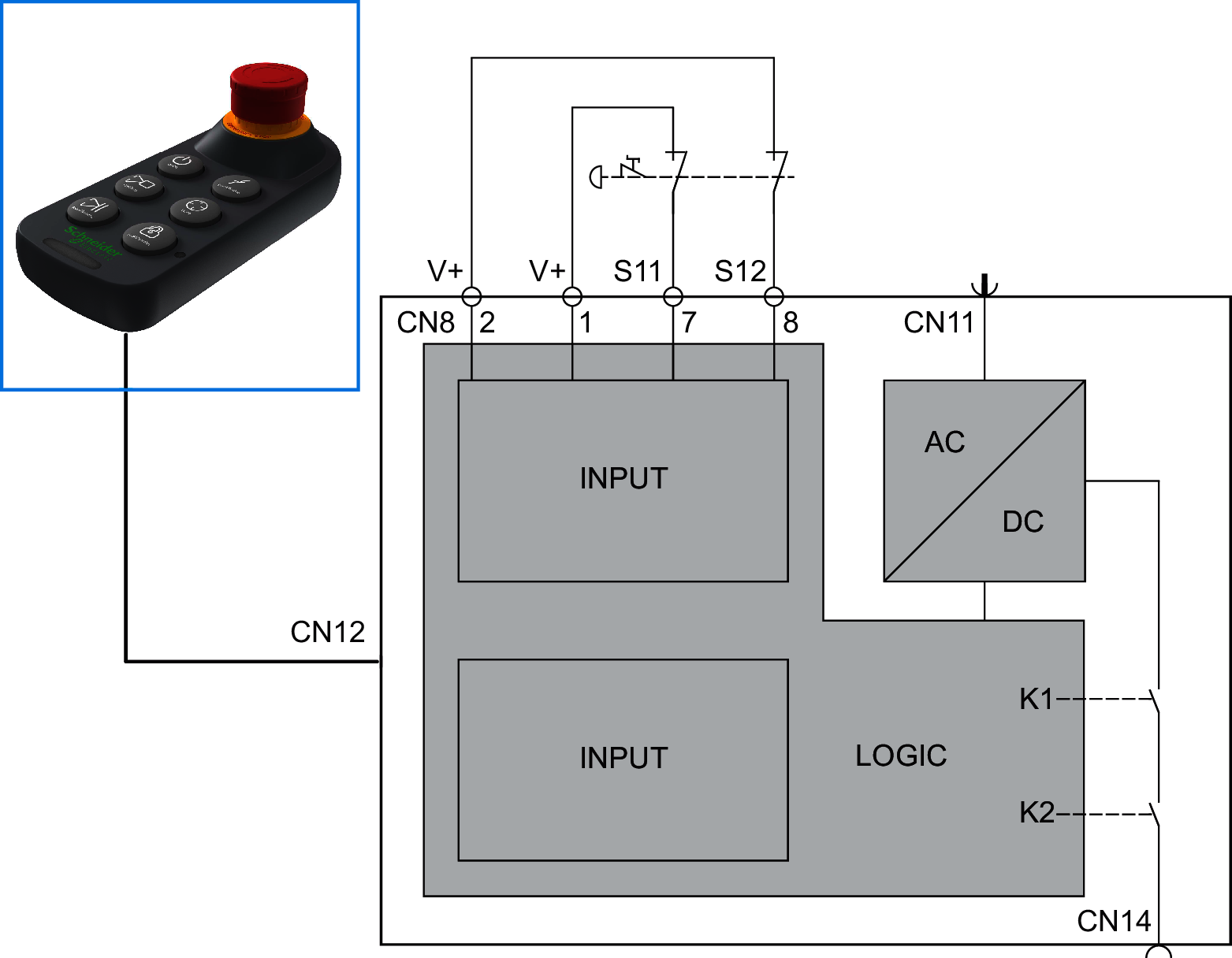
The following figure shows an example of the wiring of the Lexium Cobot Cabinet Controller.
The Lexium Cobot Controllers can also control other systems with the following safety-related outputs:
-
Lexium Cobot Control Stick emergency stop pushbutton state two-channel safety-related digital output, if configured in EcoStruxure Cobot Expert (SF19)
. -
Emergency stop state of the Lexium Cobot system two-channel safety-related digital output, if configured in EcoStruxure Cobot Expert (SF20).
For example, the status of one Lexium Cobot system can be connected to another Lexium Cobot system to synchronize the emergency stop status.
The following graphic presents the emergency stop sequence.
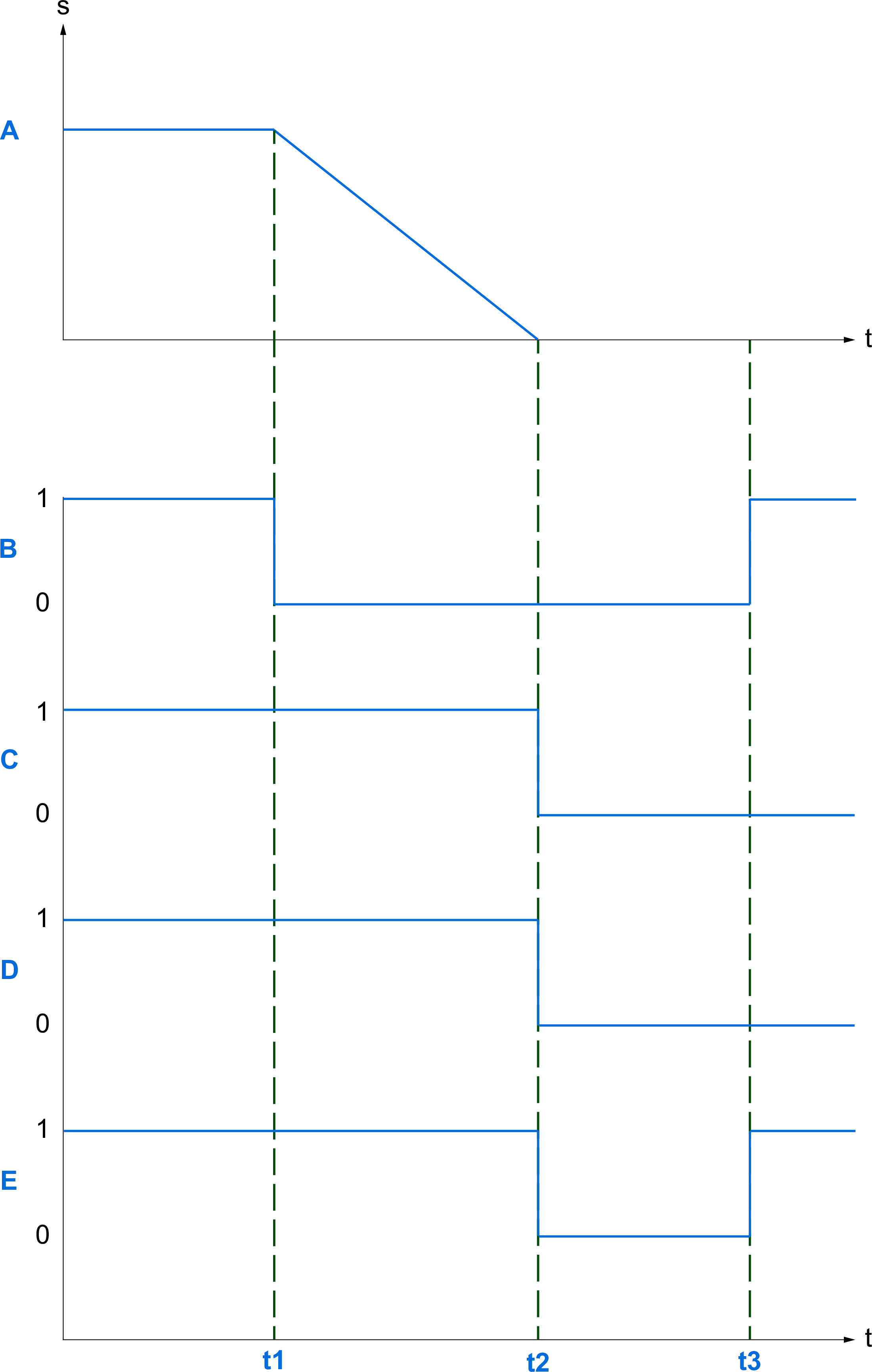
s Motion speed
t Time
A Lexium Cobot Arm motion speed
B Emergency stop input signal
C Lexium Cobot Arm is disabled (0) or enabled (1)
D Lexium Cobot Arm is powered off (0) or powered on (1)
E SF19 and SF20 (SF19 only if the emergency stop is triggered by SF1)
t1 Emergency stop pushbutton is pressed
t2 Maximum stopping time of 250 ms
t3 Emergency stop pushbutton is released
Diagnostic
The Lexium Cobot Controllers monitor the status of the safety-related inputs. If inconsistent signals are detected, the Lexium Cobot system performs a category 1 stop with a maximum stopping time of 250 ms. After this time, the Lexium Cobot Arm is powered off. The corresponding diagnostic messages are displayed in EcoStruxure Cobot Expert.