Torque and Power Limitations Safety Functions
Functional Description
The Lexium Cobot system monitors the power of the Lexium Cobot Arm and can limit it if necessary. The robot power limit is used to limit the total motion power (SF8). This limit must be configured in EcoStruxure Cobot Expert. For detailed information on configuring the robot power limit, refer to the chapter in the EcoStruxure Cobot Expert Software Guide.
The Lexium Cobot system also has several safety functions to help protect the Lexium Cobot Arm from equipment damage. These functions are not accessible for users (it is a factory setting that considers the capacity of the joint). These functions monitor the following parameters and trigger a defined safe state if the safety limits are exceeded:
-
Joint Torque Limit for each joint (SF6)
-
Joint Power Limit for each joint (SF7)
If any of the limits is exceeded, the Lexium Cobot system stops the Lexium Cobot Arm motion, engages the internal brake, and removes power from the Lexium Cobot Arm joints after a maximum stopping time of 250 ms (category 1 stop in accordance with IEC 60204-1). The Lexium Cobot Arm remains powered but is disabled.
The following graphic presents the sequence of force and power limits.
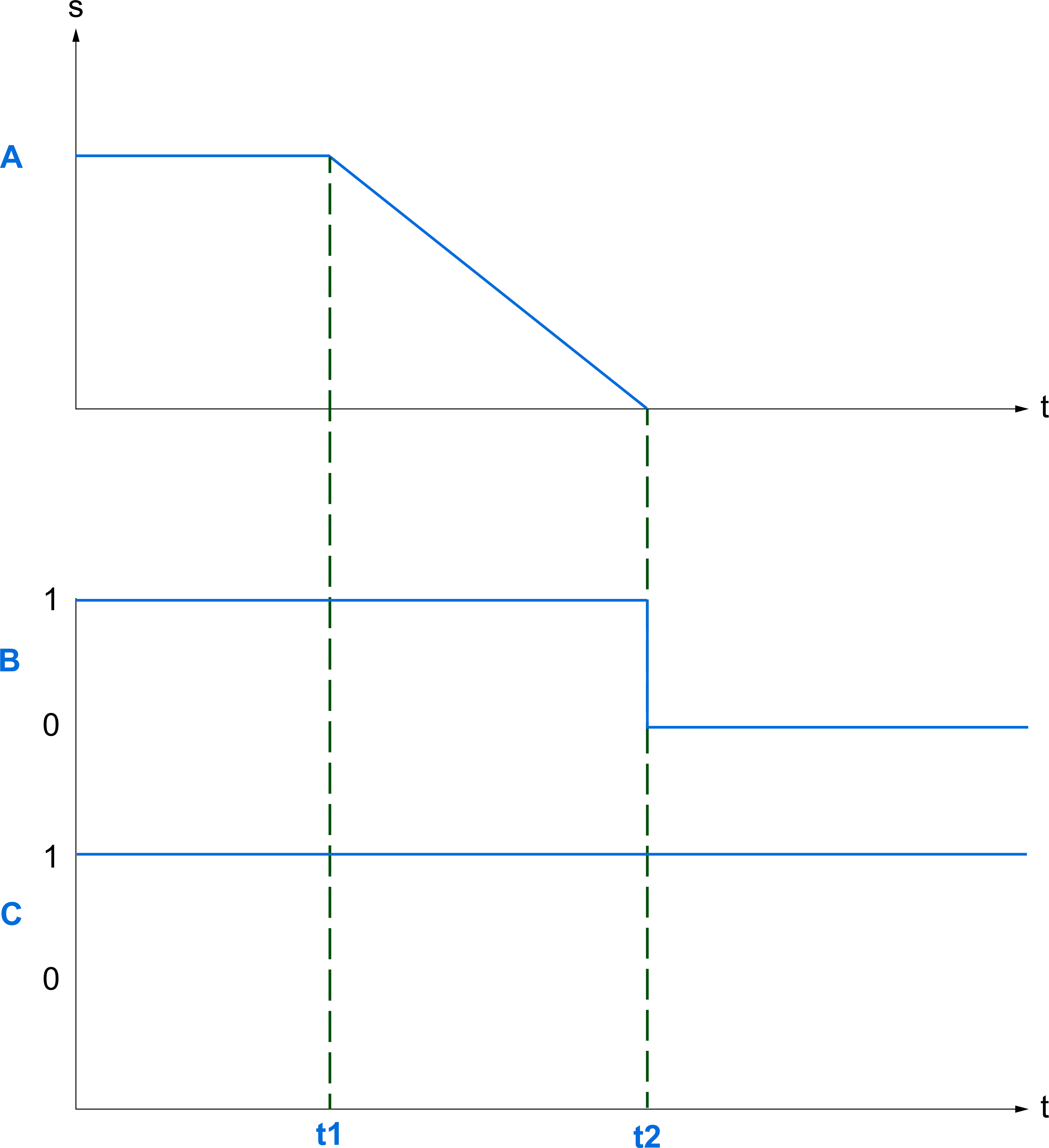
s Motion speed
t Time
A Lexium Cobot Arm motion speed
B Lexium Cobot Arm is disabled (0) or enabled (1)
C Lexium Cobot Arm is powered off (0) or powered on (1)
t1 Robot power limit, joint torque limit, or joint power limit exceeded
t2 Maximum stopping time of 250 ms
Diagnostic
The Lexium Cobot Controllers monitor the power and torque parameters of the Lexium Cobot Arm. If the Lexium Cobot Arm exceeds the joint torque, joint power and configured robot power limits, the Lexium Cobot system performs a category 1 stop.