Position Monitoring Safety Functions
Functional Description
The Lexium Cobot system provides the following options to limit the Lexium Cobot Arm motion:
-
Reducing the permitted movement (position) range for each joint (SF4)
-
Limiting the permitted orientation of the tool (SF10)
-
Limiting the position in space by setting safety planes (SF11)
The different position monitoring functions can be combined. These functions must be configured in EcoStruxure Cobot Expert. For detailed information on configuring the joint position limit, tool orientation limit, and TCP position limit (safety planes), refer to the chapter Safety Setting in the EcoStruxure Cobot Expert Software Guide.
If the Lexium Cobot Arm exceeds one or more of the limits, the Lexium Cobot system stops the Lexium Cobot Arm motion, engages the internal brakes, and removes power from the Lexium Cobot Arm joints after a maximum stopping time of 250 ms (category 1 stop in accordance with IEC 60204-1). The Lexium Cobot Arm remains powered but is disabled.
The following graphic presents the position monitoring sequence.
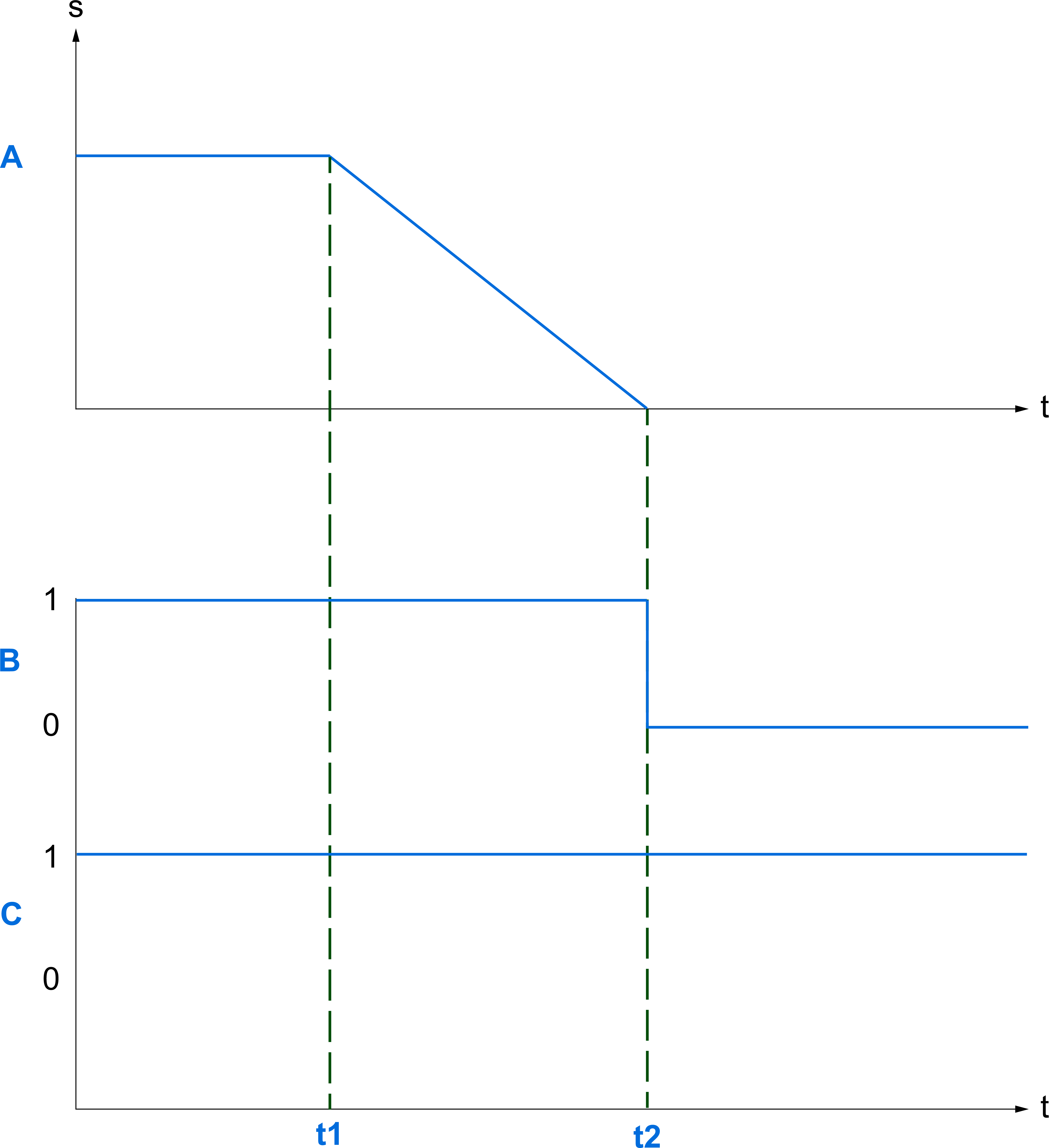
s Motion speed
t Time
A Lexium Cobot Arm motion speed
B Lexium Cobot Arm is disabled (0) or enabled (1)
C Lexium Cobot Arm powered off (0) or powered on (1)
t1 Position limit exceeded
t2 Maximum stopping time of 250 ms
Diagnostic
The Lexium Cobot Controllers monitor the joint position, TCP position, and tool orientation. If the defined limits are exceeded, the Lexium Cobot system performs a category 1 stop.