Information About the Coordinate System
General Definition for 3-D Software Applications
In 3-D software applications, a coordinate system is a mathematical system that is used to represent the position and orientation of objects in a three-dimensional space. It consists of three perpendicular axes (X axis, Y axis, and Z axis) that intersect at a point called the origin.
Color Definition of Coordinates and Denomination of Rotation
The axes of the coordinate system in EcoStruxure Machine Expert Twin are color-coded as follows:
-
X: red
-
Y: green
-
Z: blue
Denomination of rotational movement around the different axes is as follows:
-
Rotation around the X axis:
-
Rotation around the Y axis:
-
Rotation around the Z axis:

Intrinsic Rotations Convention
With reference to the global EcoStruxure Machine Expert Twin coordinate system, rotations of local assembly coordinate systems of individual body assemblies are performed according to the intrinsic convention with the default orientation convention ZYX. In an intrinsic system, each of the elemental rotations is performed on the coordinate system as rotated by the previous operation(s).
As an example, suppose the three angles specify rotations around the Z, Y, and X axes are in that order:
-
The first elemental rotation is around the Z axis.
-
For the intrinsic convention the second elemental rotation is performed around the Y axis in the new position resulting from the first rotation.
-
The final rotation around the X axis is performed around the X axis as rotated by the two previous operations in the intrinsic system.
The relationship between the three axes is fundamental in EcoStruxure Machine Expert Twin and is used to determine the orientation and position of body assemblies in a scene.
Order of Rotational Movements
When values for rotational movements of the different types are provided at the same time, for example, if an object is added by using the orientation values from the OPC UA structures, rotational movements are executed in the following order:
-
Around the Z axis:
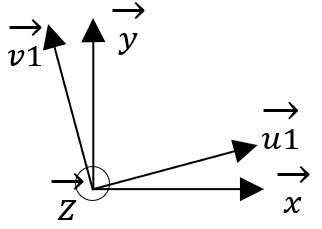
The vector z is pointing in your direction.

The intermediate vectors u1 and v1 are implicit.
-
Around the Y axis:
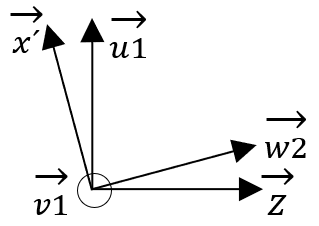
The vector v1 is pointing in your direction.

The intermediate vectors u1, v1, and w2 are implicit.
-
Around the X axis:
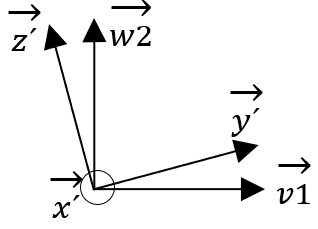
The vector x’ is pointing in your direction.

The intermediate vectors u1, v1, and w2 are implicit.