Content of the Catalog
The catalog provides a predefined LXMRL03S0••• Lexium Cobot you can move to the view and use as assembly in your scene.
Subnodes of the Assembly
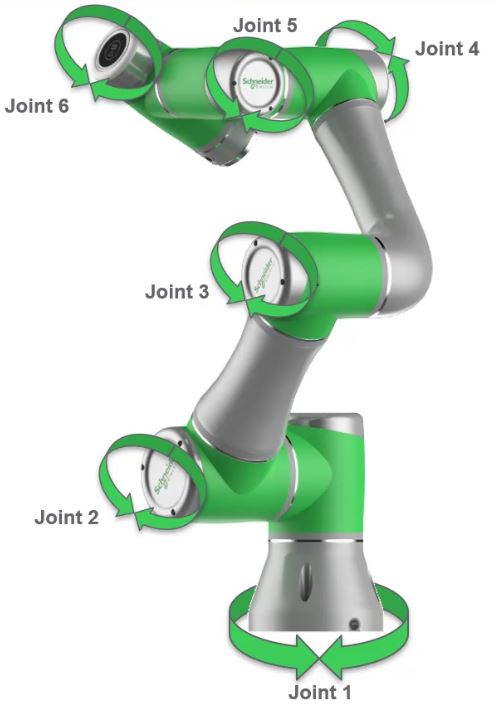
A Lexium Cobot is driven by reference values from a Lexium Cobot Controller. To this end, the assembly provides the subnodes ... in the for configuration. Connect them to reference values of a REAL data type.
To add a gripper, right-click the assembly and execute the command . For further information, refer to Managing Tools Within the View. To activate the gripper, connect the signal of type BOOL to your controller. For status messages to the controller, connect the signal of type BOOL.
Properties of a
Once you have added an object of the catalog to the view, you can select it and display the associated parameters in the view on the right-hand side of the EcoStruxure Machine Expert Twin screen. If you select the Lexium Cobot assembly in the scene or the node in the view, the following parameters can be configured in the view.
Section
|
Parameter |
Description |
|---|---|
|
|
Indicates the type of the Lexium Cobot as defined in the catalog. |
|
|
Indicates the category of the Lexium Cobot. |
|
|
Indicates the default name of the Lexium Cobot. Click the field to edit the name and adapt it to your requirements. |
Section
|
Parameter |
Description |
|---|---|
|
|
Indicates the section in which the selected Lexium Cobot is placed. To shift the Lexium Cobot to another section, open the list and select . Result: In the view, the Lexium Cobot is displayed as a subnode of . |
|
|
Indicates the tab the Lexium Cobot is connected to. |
Section
|
Parameter |
Description |
|---|---|
|
|
Select the check box to display the working envelope. The Lexium Cobot can position the Tool Center Point (TCP) in any desired direction in the displayed working space without restriction on translation and rotation of the tool flange. |
|
|
Select the check box to display the maximum working envelope. The Lexium Cobot can position the Tool Center Point (TCP) in the displayed working space with restrictions on rotation of the tool flange. |
Section
|
Parameter |
Description |
|---|---|
|
|
By default, the check box is selected and the Lexium Cobot is enabled. If this check box is not selected, the Lexium Cobot is disabled and is displayed in grey in the view. Physical properties are not available. |
Section
The , , parameters allow you to modify the angle (in °) of rotation of the assembly around the X, Y and Z coordinate.
Section
|
Parameter |
Description |
|---|---|
|
|
Select the check box to lock the position of the selected Lexium Cobot to help prevent it from being moved unintentionally. |
|
|
Enter the x, y, z coordinates (in mm) of the selected Lexium Cobot to modify the position. You can also use the fundamental mathematical operations (addition, subtraction, multiplication and division) to calculate the position coordinates. |
Section
|
Parameter |
Description |
|---|---|
|
|
Select one of the following : Click the button of the event to open a view where you can enter the programming code to execute when the selected event is detected. The view provides the same functions as described in the EcoStruxure Machine Expert Twin Getting Started User Guide. |