SDIneg und SDIpos - Sichere Drehrichtung negativ/positiv (Safe Direction Negative/Positive)
Allgemeine Funktionsbeschreibung
Die Sicherheitsfunktion Sichere Drehrichtung stellt sicher, dass eine Rotation/Bewegung nur in der erlaubten (parametrierten) Richtung möglich ist.
Der Funktionsbaustein unterscheidet zwischen zwei Rotations-/Bewegungsrichtungen, indem er separate Eingänge für die Anforderung der negativen oder positiven SDI-Überwachungsfunktion bereitstellt: SDIneg und SDIpos. Beide SDI-Überwachungsfunktionen werden mit denselben Parametern konfiguriert, lassen sich aber unabhängig voneinander anfordern.
HINWEIS:
In welcher physikalischen Rotations-/Bewegungsrichtung SDIpos oder SDIneg tatsächlich resultiert, hängt von Ihrer Anwendung ab.
HINWEIS:
Falls SDIpos und SDIneg gleichzeitig angefordert werden, wird automatisch die SS1-Funktion als die definierte Fallback-Funktion ausgeführt.
Die SDIneg/SDIpos-Funktion verhindert, dass der Motor um mehr als den definierten Betrag in die falsche Richtung abweicht (Geräteparameter SDI_PositionTolerance[sTol], siehe unten).
Überwachung durch den sicherheitsbezogenen FB bzw. das Safety-Modul
Die Anforderung der Sicherheitsfunktion erfolgt zu Beginn des Zeitintervalls t1 (Signal 'S_SDI*_Request' im Diagramm). t1 wird über den Geräteparameter SDI_StartDelayTime[t1] eingestellt.
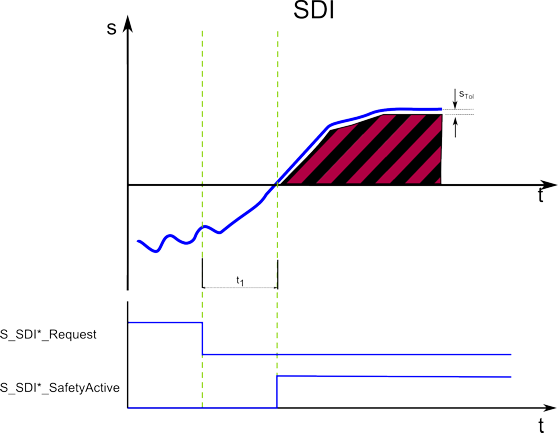
Innerhalb des Zeitintervalls t1 empfängt die Standard-Steuerung ebenfalls die Anforderung aus dem angeschlossenen Prozess und startet die Motion Control-Funktion gemäß der in der Standard-Anwendung definierten Logik und Antriebsparametrierung.
Nach Ablauf von t1 wird die Richtung durch das Erfassen der Position überwacht. Die Bewegung/Rotation in Gegenrichtung zur erlaubten Richtung ist zulässig, wenn die definierte Positionstoleranz STol nicht überschritten wird.
Wenn die SDI-Funktion erfolgreich ausgeführt wird, steuert der Funktionsbaustein S_SDI*_SafetyActive auf SAFETRUE (siehe Diagramm).
Wenn die SS1-Fallback-Funktion aufgrund eines erkannten Fehlers der Positionstoleranz wie oben beschrieben aktiviert wurde, wird dies durch S_SS1_SafetyActive = SAFETRUE angezeigt.
Fallback-Funktion
Falls die erfasste Position um mehr als die eingestellte Positionstoleranz (Parameter SDI_PositionTolerance[sTol]) in die falsche Richtung abweicht, wird automatisch die SS1-Funktion als Fallback ausgeführt.
Anwendung
Die SDI-Funktion wird verwendet, um sicherzustellen, dass eine Rotation oder Bewegung in eine unerlaubte Richtung nicht möglich ist, z.B. wenn Personen den Betriebsbereich einer Maschine betreten.
So implementieren Sie die Sicherheitsfunktion
Um diese Sicherheitsfunktion in Ihrer sicherheitsbezogenen Applikation zu implementieren, gehen Sie wie folgt vor:
Fügen Sie im 'Geräte'-Fenster in EcoStruxure Machine Expert für das verwendete Drive ein Sicherheitsmodul ein.
Fügen Sie in EcoStruxure Machine Expert - Safety einen Preventa Motion FB SF_SafeMotionControl in den sicherheitsbezogenen Code ein und verbinden Sie dessen Formalparameter.
Markieren Sie im 'Geräte'-Fenster in EcoStruxure Machine Expert - Safety (links im Gerätebaum) das Sicherheitsmodul und editieren Sie die sicherheitsbezogenen Parameter in der Gruppe 'SafeDirection'.
Details entnehmen Sie der Parameterbeschreibung für das betreffende Sicherheitsmodul Lexium 62 LXM bzw. Lexium 62 ILM.