SOS - Funktion "Safe Operation Stop"
Allgemeine Funktionsbeschreibung
Die Sicherheitsfunktion SOS überwacht den Antrieb im Stillstand mit aktiver Lageregelung (durchgeführt von der nicht-sicherheitsbezogenen Standard-Steuerung) und die Positionsüberwachung (durchgeführt vom Safety-Modul).
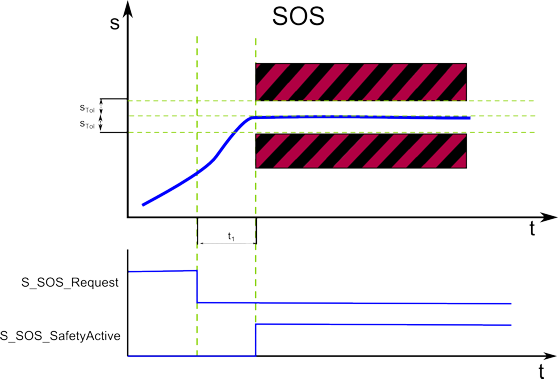
Die SOS-Funktion verhindert, dass der Motor um mehr als einen definierten Betrag von der angehaltenen Halteposition abweicht (Geräteparameter SOS_PositionTolerance[sTol] (siehe unten), in der folgenden Grafik als STol angezeigt). Das Antriebsmodul liefert dem Motor die Energie, die notwendig ist, von außen angreifenden Kräften standzuhalten.
Überwachung durch den sicherheitsbezogenen FB bzw. das Safety-Modul
Die Anforderung der Sicherheitsfunktion erfolgt zu Beginn des Zeitintervalls t1 (Signal 'S_SOS_Request' im Diagramm). t1 wird über den Geräteparameter SOS_StartDelayTime[t1] eingestellt.
Innerhalb des Zeitintervalls t1 empfängt die Standard-Steuerung ebenfalls die Anforderung aus dem angeschlossenen Prozess und startet die Motion Control-Funktion gemäß der in der Standard-Anwendung definierten Logik und Antriebsparametrierung.
Nach Ablauf von t1, wird Position S0 erfasst und SOS überwacht.
SOS führt eine sichere Stillstandsüberwachung durch. Die Lageregelung bleibt aktiv. Dadurch kann der Motor das volle Drehmoment liefern, um die aktuelle Position zu halten. Die Position wird überwacht und muss innerhalb der parametrierten Positionstoleranzwerte bleiben (STol).
Wenn die parametrierten Werte STol nach t1 nicht überschritten werden, steuert der Funktionsbaustein S_SOS_SafetyActive auf SAFETRUE.
Fallback-Funktion
Wenn die Stillstandsüberwachung erkennt, dass die Position um mehr als die definierte Positionstoleranz von der Stillstandsposition abweicht (STol in der Abbildung), wird automatisch die STO-Funktion als Fallback-Funktion ausgeführt.
Anwendung
SOS ist für Anwendungen nützlich, bei denen Maschinen oder Maschinenteile für bestimmte Vorgänge im Stillstand bleiben müssen und wo der Antrieb das Drehmoment für die Haltebremse liefern muss. Die Aufgabe des Antriebs ist es, dem Motor die nötige Energie zu liefern, um einem durch externe Kräfte erzeugten Drehmoment entgegenzuwirken.
So implementieren Sie die Sicherheitsfunktion
Um diese Sicherheitsfunktion in Ihrer sicherheitsbezogenen Applikation zu implementieren, gehen Sie wie folgt vor:
Fügen Sie im 'Geräte'-Fenster in EcoStruxure Machine Expert für das verwendete Drive ein Sicherheitsmodul ein.
Fügen Sie in EcoStruxure Machine Expert - Safety einen Preventa Motion FB SF_SafeMotionControl in den sicherheitsbezogenen Code ein und verbinden Sie dessen Formalparameter.
Markieren Sie im 'Geräte'-Fenster in EcoStruxure Machine Expert - Safety (links im Gerätebaum) das Sicherheitsmodul und editieren Sie die sicherheitsbezogenen Parameter in der Gruppe 'Mechanic'.
Details entnehmen Sie der Parameterbeschreibung für das betreffende Sicherheitsmodul Lexium 62 LXM bzw. Lexium 62 ILM.