Allgemeine Funktionsbeschreibung
Die Funktion Sicherer Stopp 1 bewirkt ein schnelles und sicheres Stoppen des Antriebs. Der Antrieb bremst eigenständig ab und aktiviert am Ende die antriebsinterne STO-Funktion (Safe Torque Off, Sicher abgeschaltetes Drehmoment). Dadurch bleibt der Antrieb drehmomentfrei und der Motor wird nicht länger mit Energie versorgt. (Im Gegensatz dazu, überwacht die Funktion Sicherer Stopp 2 anstelle von STO den Stillstand, ähnlich der SOS-Funktion.)
Die aktive STO-Funktion führt zu einer nachfolgenden Anlauf-/Wiederanlaufsperre (siehe Abschnitt unten).
SS1 realisiert das funktional sichere Stoppen entsprechend Stopp-Kategorie 1 gemäß EN 60204-1.
SS1 ist die definierte Fallback-Funktion der sicherheitsbezogenen Funktionen SLS1 bis SLS4, SMS, SDIneg und SDIpos.
Überwachung durch den sicherheitsbezogenen FB bzw. das Safety-Modul
Das Überwachungsverhalten des Funktionsbausteins hängt von der Parametrierung des Safety-Moduls ab:
Falls die Rampenüberwachung deaktiviert ist, ist die Überwachung passiv, bis das Zeitintervall t2 abgelaufen ist (siehe Abbildung und Beschreibung unten).
Falls die Rampenüberwachung aktiviert ist, überwacht das Safety-Modul die durch die Abbremsrampe spezifizierte Abbremsung des Motors.
In beiden Fällen stoppt die SS1-Funktion den Motor und initiiert dann die STO-Funktion, um den Antrieb drehmomentfrei zu setzen.
Die Anforderung der Sicherheitsfunktion erfolgt zu Beginn des Zeitintervalls t1 (Signal 'S_SS1_Request' im Diagramm). t1 wird über den Geräteparameter SS1_StartDelayTime[t1] eingestellt.
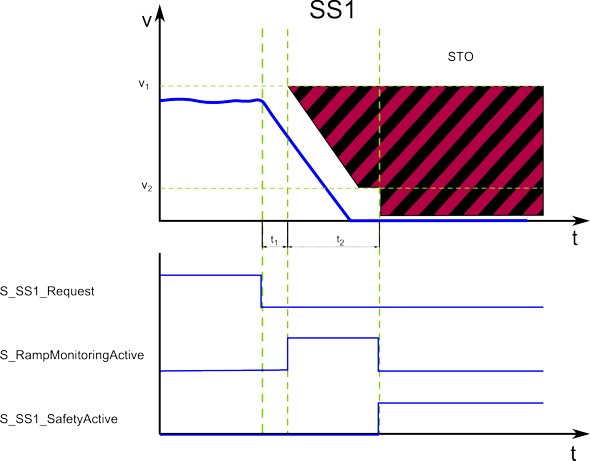
Innerhalb des Zeitintervalls t1 empfängt die Standard-Steuerung ebenfalls die Anforderung aus dem angeschlossenen Prozess und startet die Motion Control-Funktion gemäß der in der Standard-Anwendung definierten Logik und Antriebsparametrierung.
Nach Ablauf von t1 wird der Antriebs abgebremst. Die maximal erlaubte Dauer t2 dieser Rampenphase ist durch den Geräteparameter SS1_RampMonitoringTime[t2] definiert.
Am Ende von t2 ist STO aktiviert.
Während t2 kann die Abbremsung durch Einstellen des Geräteparameters SS1_RampMonitoring = Aktiviert überwacht werden.
Falls die Rampenüberwachung deaktiviert ist, wird die Abbremskurve nicht überwacht. Während des Zeitintervalls t2 ist sogar eine Beschleunigung erlaubt. Der Stillstand wird erzwungen, wenn t2 mit der Aktivierung der STO-Funktion abläuft.
Falls die Rampenüberwachung aktiviert ist, wird die Abbremskurve überwacht und muss der parametrierten Rampe folgen (wie in der Abbildung gezeigt). Andernfalls wird STO als die definierte Fallback-Funktion aktiviert.
Wenn Geschwindigkeit Null erreicht wurde solange t2 noch nicht abgelaufen ist, ist eine definierte Geschwindigkeitstoleranz der Achse erlaubt (Parameter SS1_MinRampVelocity[v2]) und wird hinsichtlich v2 überwacht.
Wenn der drehmomentfreie Status des Antriebs durch die korrekte Ausführung der SS1-Funktion erreicht wurde, steuert der Funktionsbaustein S_SS1_SafetyActive auf SAFETRUE (siehe Diagramm).
Andernfalls, wenn die STO-Fallback-Funktion aufgrund eines erkannten Fehlers wie oben beschrieben aktiviert wurde, wird dies durch S_STO_SafetyActive = SAFETRUE angezeigt.
Fallback-Funktion
Wenn der parametrierte Wert SS1_RampMonitoringTime[t2] überschritten wird, oder bei aktivierter Rampenüberwachung die parametrierte Abbremsrampe nicht wie vorgegeben eingehalten wird oder die Geschwindigkeitstoleranz (v2 in der Abbildung) überschritten wird, wird automatisch die STO-Funktion als Fallback ausgeführt.
Anwendung
Die SS1-Funktion wird verwendet, wenn eine gesteuerte Abbremsung des Antriebs mit anschließendem drehmomentfreien Stillstand benötigt wird, z.B. nach einem sicherheitsrelevanten Ereignis.
SS1 ist geeignet, um eine große Schwungmasse so schnell wie möglich anzuhalten bzw. zu verlangsamen und von hohen Antriebsdrehzahlen so schnell wie möglich zum Stillstand zu gelangen. Typische Beispiele sind Schleifspindeln, Zentrifugen, Regalbediengeräte.
Wiederanlaufsperre nach SS1
Nach Aufhebung der Anforderung einer SS1-Funktion, indem Eingang S_SS1_Request von SAFEFALSE auf SAFETRUE gesteuert wird, ist automatisch eine Wiederanlaufsperre aktiv, um den unbeabsichtigten Wiederanlauf der Achse zu verhindern. Die Wiederanlaufsperre wird erst durch eine positive Signalflanke an Eingang Reset des sicherheitsbezogenen Funktionsbausteins aufgehoben.
Hintergrund: Gemäß der zutreffenden Norm IEC 60204-1, führt die SS1-Funktion Stopp-Kategorie 1 aus. Diese Stopp-Kategorie bedingt eine nachfolgende Wiederanlaufsperre.
So implementieren Sie die Sicherheitsfunktion
Um diese Sicherheitsfunktion in Ihrer sicherheitsbezogenen Applikation zu implementieren, gehen Sie wie folgt vor:
Fügen Sie im 'Geräte'-Fenster in EcoStruxure Machine Expert für das verwendete Drive ein Sicherheitsmodul ein.
Fügen Sie in EcoStruxure Machine Expert - Safety einen Preventa Motion FB SF_SafeMotionControl in den sicherheitsbezogenen Code ein und verbinden Sie dessen Formalparameter.
Markieren Sie im 'Geräte'-Fenster in EcoStruxure Machine Expert - Safety (links im Gerätebaum) das Sicherheitsmodul und editieren Sie die sicherheitsbezogenen Parameter in der Gruppe 'SafeStop1'.
Details entnehmen Sie der Parameterbeschreibung für das betreffende Sicherheitsmodul Lexium 62 LXM bzw. Lexium 62 ILM.