STO - Funktion "Safe Torque Off"
Allgemeine Funktionsbeschreibung
Die STO-Funktion ist die gängigste und grundlegende im Antrieb integrierte Sicherheitsfunktion. Wenn STO aktiviert ist, wird der Motor nicht mehr mit rotations- oder bewegungsverursachender Energie versorgt. Die Leistungsendstufe des Antriebs liefert dem Motor keinerlei Energie, die Drehmoment oder (im Falle eines linearen Motors) Kraft erzeugen kann.
Eine aktive STO-Funktion führt zu einer nachfolgenden Anlauf-/Wiederanlaufsperre (siehe Abschnitt unten).
Die STO-Funktion verhindert gemäß EN 60204-1, Abschnitt 5.4, einen unbeabsichtigten Start. Die aktive STO-Funktion deaktiviert die Leistungsendstufe im Antrieb. Der Antrieb ist dann drehmomentfrei. Dieser Zustand wird im Antrieb intern überwacht.
Anforderung/Überwachung durch den sicherheitsbezogenen FB bzw. das Safety-Modul
Sofort nach der STO-Aktivierung, wird der Antrieb drehmomentfrei gesetzt und die Achse läuft aus bis Geschwindigkeit Null erreicht ist.
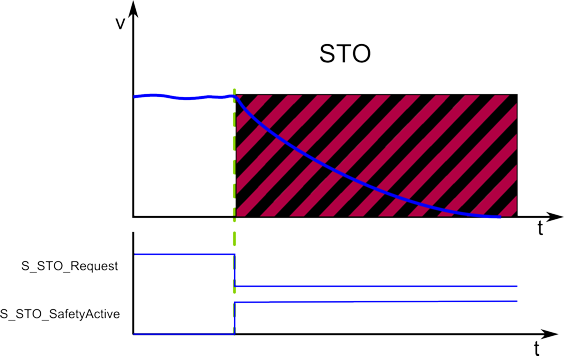
Die STO-Sicherheitsfunktion wird sofort bei Anforderung ausgeführt. STO kann angefordert werden, indem das Signal an Eingang S_STO_Request (falls Eingang Activate = TRUE) auf SAFEFALSE gesteuert wird oder über die festverdrahtete Verbindung (falls der Geräteparameter des Safety-Moduls HW_STO = Aktiviert). Beachten Sie den nachfolgenden Abschnitt.
Der drehmomentfreie Zustand des Antriebs wird angezeigt, indem der Bausteinausgang S_STO_SafetyActive auf SAFETRUE gesteuert wird.
Nach dem Anzeigen der aktiven STO-Funktion läuft die Achse aus. Deshalb ist S_STO_SafetyActive = SAFETRUE nicht zwingend gleichbedeutend mit dem Stillstand der Achse. Die Auslaufzeit hängt von den physikalischen Eigenschaften der verwendeten Komponenten ab, wie z.B. Gewicht, Drehmoment, Reibung, usw.
WARNUNG
UNBEABSICHTIGTER BETRIEBSZUSTAND DES GERÄTS
Stellen Sie sicher, dass während des Auslaufens der Achse/Maschine keine Gefährdung für Personen oder Material entstehen kann.
Betreten Sie den Betriebsbereich nicht, während die Maschine ausläuft.
Stellen Sie sicher, dass keine anderen Personen den Betriebsbereich betreten können, während die Maschine ausläuft.
Verwenden Sie geeignete Sicherheitsverriegelungen, wenn eine Gefahr für Personen und/oder Ausrüstung besteht.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Körperverletzungen oder Sachschäden zur Folge haben.
Anwendung
Da die STO-Funktion des Antriebs die Leistungsstufe des Motors deaktiviert, kann sie in Anwendungen eingesetzt werden, in denen die Achse aufgrund ihres Lastmoments oder Reibung in einer ausreichend kurzen Zeit von selbst zum Stillstand kommt, oder wenn das Auslaufen der Achse keine Sicherheitsrelevanz hat.
STO als allgemeiner funktional sicherer Zustand: Die STO-Funktion ist als der standardmäßige funktional sichere Zustand definiert. Die STO-Funktion ist deshalb die finale Fallback-Funktion der weiteren hier beschriebenen Sicherheitsfunktionen.
So implementieren Sie die Sicherheitsfunktion
Um diese Sicherheitsfunktion in Ihrer sicherheitsbezogenen Applikation zu implementieren, gehen Sie wie folgt vor:
Fügen Sie im 'Geräte'-Fenster in EcoStruxure Machine Expert für das verwendete Drive ein Sicherheitsmodul ein.
Fügen Sie in EcoStruxure Machine Expert - Safety einen Preventa Motion FB SF_SafeMotionControl in den sicherheitsbezogenen Code ein und verbinden Sie dessen Formalparameter.
Markieren Sie im 'Geräte'-Fenster in EcoStruxure Machine Expert - Safety (links im Gerätebaum) das Sicherheitsmodul und editieren Sie in der sicherheitsbezogenen Geräteparametrierung (Gruppe 'Basic') den Parameter HW_STO_Config.
Details entnehmen Sie der Parameterbeschreibung für das betreffende Sicherheitsmodul Lexium 62 LXM bzw. Lexium 62 ILM.