ILM62FS - Sicherheitsmodul für ILM62 Drives
Typ-/sicherheitsbezogene Anwendungsbereiche des Moduls
Es werden die folgenden sicherheitsbezogenen Funktionen unterstützt:
Das Sicherheitskonzept beruht auf der generellen Annahme, dass erforderliche sicherheitsbezogene Bewegungen von der (nicht-sicherheitsbezogenen) Standard-Steuerung und vom Antrieb ausgeführt werden. Das bedeutet, die sicherheitsbezogenen Funktionen überwachen die Bewegungen der Achse nur, steuern Sie jedoch nicht.
Wenn das Sicherheitssystem die inkorrekte Ausführung einer Bewegung oder einen internen Fehler im Drive erkennt, geschieht Folgendes:
Das Drive beendet die aktuell ausgeführte sicherheitsbezogene Funktion und
das Sicherheitssystem initiiert die erforderliche Fallback-Ebene (z.B. den definierten sicheren Zustand) und
die Leistungsendstufe des Antriebs wird deaktiviert. In der Folge ist der Motor drehmomentfrei und hält an.
Beispiel: Die sicherheitsbezogene SLS-Funktion (Safely Limited Speed) überwacht die konfigurierte Höchstgeschwindigkeit des Antriebs. Wird die definierte Höchstgeschwindigkeit überschritten, bringen die Fallback-Funktionen SS1 gefolgt von STO den Motor in den drehmomentfreien Zustand.
Die Implementierung der sicherheitsbezogenen Überwachung muss im sicherheitsbezogenen Anwendungsprogramm (SLC-Programm) erfolgen, mit Hilfe des sicherheitsbezogenen Funktionsbausteins Preventa SF_SafeMotionControl.
HINWEIS:
Sobald in der Sercos-Busstruktur ein Sicherheitsmodul enthalten ist, lässt sich das sicherheitsbezogene Projekt in EcoStruxure Machine Expert - Safety nicht erfolgreich kompilieren, wenn kein sicherheitsbezogener Preventa SF_SafeMotionControl-Funktionsbaustein verwendet wird.
Weitere Informationen
Weitere Informationen hierzu finden Sie im Hilfekapitel "Preventa SF_SafeMotionControl-Funktionsbaustein".
Die sicherheitsbezogenen Schneider Electric-Module können in sicherheitsbezogenen Anwendungen verwendet werden, gemäß:
EN ISO 13849, PL e
IEC 62061, SIL 3
IEC 61508, SIL 3
Parameter: MinErforderlicheFWVer
|
Standardwert |
Basic Release |
|
Einheit |
-/- |
|
Beschreibung |
Dieser Parameter ist nur relevant, wenn eine andere Firmware-Version, als die vom Hersteller aufgespielte Version in Betrieb ist. Um in den Betriebszustand gelangen zu können, muss im Modul die hier eingestellte oder eine neuere Firmware-Version installiert sein.
Die hier gewählte Firmware-Version ist vor allem im Hinblick auf neue Parameter oder Prozessdaten-Elemente wichtig, die mit einer bestimmten Firmware-Version implementiert wurden. Falls das betreffende Gerät über neue Parameter oder Prozessdaten-Elemente verfügt, ist folgendes zu beachten: Wenn für MinErforderlicheFWVer ein falscher Wert eingestellt ist, gelangt entweder der SLC nicht in den Betriebszustand Run oder der neue Parameter bzw. das neue Prozessdaten-Element wird vom SLC nicht berücksichtigt. Beachten Sie hierzu den Gefahrenhinweis unter dieser Tabelle. Weitere Informationen Informationen zu neu hinzugefügten Parametern oder Prozessdaten-Elementen finden Sie in der Dokumentation (Release Notes), die der Firmware-Installation beiliegt. Darin erfahren Sie auch, wie Sie die Firmware-Version, die aktuell auf dem sicherheitsbezogenen Gerät installiert ist, bestimmen können. |
WARNUNG
UNBEABSICHTIGTER BETRIEBSZUSTAND DES GERÄTS
Stellen Sie sicher, dass der unter MinErforderlicheFWVer eingestellte Wert der Firmware-Version entspricht, die auf diesem sicherheitsbezogenen Gerät installiert ist.
Stellen Sie anhand eines Funktiontests sicher, dass neu implementierte Parameter oder Prozessdaten-Elemente des sicherheitsbezogenen Moduls vom SLC berücksichtigt werden, wenn Ihre sicherheitsbezogene Applikation dies erfordert.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Körperverletzungen oder Sachschäden zur Folge haben.
Parameter: Optional
|
Standardwert |
Nein |
|
Einheit |
-/- |
|
Beschreibung |
Das Modul kann mit Hilfe dieses Parameters als optional konfiguriert werden. Optionale Module müssen nicht vorhanden sein (physikalisch oder kommunikativ), d.h. ein fehlendes optionales Modul wird vom Sicheren Logik-Controller nicht gemeldet. Dieser Parameter beeinflusst nicht das Signal oder die Statusdaten des Moduls. |
|
Mögliche Werte |
|
Der Parameter Optional ist ein Mechanismus, um Ihr Sicherheitssystem an unterschiedliche Maschinenkonfigurationen anzupassen. Es ist jedoch möglich, dass als optional parametrierte Module in einer wechselnden/anderen Konfiguration erforderlich sind.
WARNUNG
UNBEABSICHTIGTER BETRIEBSZUSTAND DES GERÄTS
Stellen Sie anhand eines Funktiontests sicher, dass die Module, für die Optional auf 'Ja' oder 'Hochlauf' eingestellt ist, vorhanden sind, wenn diese in wechselnden/anderen Maschinenkonfigurationen erforderlich sind.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Körperverletzungen oder Sachschäden zur Folge haben.
Parameter: HW_STO_Config
|
Standardwert |
HW_STO verwendet |
|
Einheit |
-/- |
|
Beschreibung |
Spezifiziert, ob die STO-Sicherheitsfunktion nur via Software oder zusätzlich über die festverdrahtete Signalverbindung des Drive angefordert werden kann. |
|
Mögliche Werte |
In den Tabellen oben bedeuten SW = "Software STO-Anforderung über Eingang S_STO_Request des Funktionsbausteins" und HW = "festverdrahtete STO-Anforderung". |
WARNUNG
UNBEABSICHTIGTER BETRIEBSZUSTAND DES GERÄTS
Berücksichtigen Sie in Ihrer Risikoanalyse, welche Auswirkung die Aktivierung oder die Deaktivierung der Möglichkeit zur Anforderung der STO-Sicherheitsfunktion über die festverdrahtete Signalverbindung hat.
Bei deaktivierter festverdrahteter STO-Signalverbindung müssen Sie sicherstellen, dass der Preventa SF_SafeMotionControl-Funktionsbaustein korrekt implementiert ist und die STO-Funktion über den Eingangsformalparameter S_STO_Request des Funktionsbausteins ordnungsgemäß aufgerufen werden kann.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Körperverletzungen oder Sachschäden zur Folge haben.
Parameter: SafeFeedbackConfig
|
Standardwert |
Sichere Geschwindigkeit [units/s] |
|
Einheit |
-/- |
|
Beschreibung |
Spezifiziert, ob entweder die Achsgeschwindigkeit oder der vom Encoder gelieferte Inkrementwert über das sicherheitsbezogene Prozessdaten-Element SafeFeedback ausgegeben wird und dort von der sicherheitsbezogenen Applikation gelesen werden kann. Eine Beschreibung des Prozessdaten-Elements finden Sie im Abschnitt unten. |
|
Mögliche Werte |
|
Gruppe: SafetyResponseTime
Die Safety-Reaktionszeit ist die Zeit zwischen dem Eintreffen des Sensorsignals am Eingangskanal eines sicherheitsbezogenen Eingangsmoduls und dem Abschaltsignal am Ausgangskanal eines sicherheitsbezogenen Ausgangsmoduls. Weitere detaillierte Hintergrundinformationen finden Sie im Thema "Safety-Reaktionszeit".
Die Parameter in dieser Gruppe beeinflussen die Safety-Reaktionszeit des Sicheren Logik-Controller-Systems. Die Parameter KommunikationsWatchdog, MinDatenübertragungszeit und MaxDatenübertragungszeit in dieser Gruppe gelten nur dann für dieses Modul, wenn ManuelleKonfiguration auf 'Ja' gesetzt ist.
Parameter: ManuelleKonfiguration
|
Standardwert |
Nein |
|
Einheit |
-/- |
|
Beschreibung |
Gibt an, ob das Modul seine eigenen modulspezifischen Safety-Reaktionszeit-relevanten Parameter (KommunikationsWatchdog, MinDatenübertragungszeit und MaxDatenübertragungszeit) verwendet oder die Standardwerte, die in der Parametergruppe 'SafetyResponseTimeDefaults' des Sicheren Logik-Controllers vorgegeben sind. Die Verwendung modulspezifischer Parameter ermöglicht die optimale Anpassung des Systems an anwendungsspezifische Anforderungen hinsichtlich der Safety-Reaktionszeit. |
|
Parameterwert |
|
Parameter: MinDatenübertragungszeit
|
Standardwert |
12 |
|
Wertebereich Schrittweite |
12...65,535 1 |
|
Einheit |
100 µs |
|
Beschreibung |
Legt die benötigte Mindestzeit für die Übertragung eines Datentelegramms zwischen Producer und Consumer fest. Wird ein Telegramm früher (vom Consumer) empfangen, als durch diesen Parameterwert vorgegeben, so wird die Kommunikation als ungültig betrachtet. EcoStruxure Machine Expert - Safety verfügt über einen Berechnungsdialog für die Bestimmung dieses Parameterwertes. Begriffsdefinition und Hintergrundinformation Gemäß openSAFETY-Spezifikation kommunizieren Geräte (sicherheitsbezogene I/O-Module und der Sichere Logik-Controller), indem sie zyklisch Daten, sogenannte openSAFETY-Telegramme, senden und empfangen. Ein Gerät, das Telegramme erzeugt (sendet), wird als Producer bezeichnet, ein empfangendes Gerät als Consumer. Jedes Telegramm enthält einen Zeitstempel für die Zeitvalidierung der Kommunikation. Beim Empfang eines Telegramms vergleicht der Consumer diesen Zeitstempel mit der aktuellen Zeit. Falls der Zeitplan eingehalten wurde, wird die Kommunikation als gültig betrachtet. Wird ein Telegramm früher empfangen, als durch diesen Parameter definiert, wird die Kommunikation als ungültig betrachtet und nicht weiter fortgesetzt. Dadurch steuert auch das Prozessdaten-Element 'SafeModuleOK' auf SAFEFALSE und zeigt damit an, dass die sicherheitsbezogene Kommunikation des Moduls nicht länger gültig ist. Die Auswirkungen für den Rest der sicherheitsbezogenen Systeme hängen von der definierten sicherheitsbezogenen Funktion ab. |
|
Berechnung der Werte |
So berechnen Sie den modulspezifischen MinDatenübertragungszeit-Wert
|
|
Praktische Werte |
Die Verwendung des in EcoStruxure Machine Expert - Safety berechneten Werts für MinDatenübertragungszeit führt zu einem stabil laufenden System. |
Parameter: MaxDatenübertragungszeit
|
Standardwert |
200 |
|
Wertebereich Schrittweite |
12...65,535 1 |
|
Einheit |
100 µs |
|
Beschreibung |
Definiert die erlaubte maximale Zeit für die Übertragung eines Datentelegramms zwischen Producer und Consumer. Wird ein Telegramm später (vom Consumer) empfangen, als durch diesen Parameterwert vorgegeben, so wird die Kommunikation als ungültig angesehen. EcoStruxure Machine Expert - Safety verfügt über einen Berechnungsdialog für die Bestimmung dieses Parameterwertes. HINWEIS: Der Parameterwert beeinflusst die von EcoStruxure Machine Expert - Safety berechnete Safety-Reaktionszeit. Begriffsdefinition und Hintergrundinformation Gemäß openSAFETY-Spezifikation kommunizieren Geräte (sicherheitsbezogene I/O-Module und der Sichere Logik-Controller), indem sie zyklisch Daten, sogenannte openSAFETY-Telegramme, senden und empfangen. Ein Gerät, das Telegramme erzeugt (sendet), wird als Producer bezeichnet, ein empfangendes Gerät als Consumer. Jedes Telegramm enthält einen Zeitstempel für die Zeitvalidierung der Kommunikation. Beim Empfang eines Telegramms vergleicht der Consumer diesen Zeitstempel mit der aktuellen Zeit. Falls der Zeitplan eingehalten wurde, wird die Kommunikation als gültig betrachtet. Wird ein Telegramm später empfangen, als durch diesen Parameter definiert, wird die Kommunikation als ungültig betrachtet und nicht weiter fortgesetzt. Die Auswirkungen für den Rest der sicherheitsbezogenen Systeme hängen von der definierten sicherheitsbezogenen Funktion ab. |
|
Berechnung der Werte |
So berechnen Sie den modulspezifischen Wert für MaxDatenübertragungszeit
|
|
Praktische Werte |
Die Verwendung des in EcoStruxure Machine Expert - Safety berechneten Werts für MaxDatenübertragungszeit führt zu einem stabil laufenden System. |
Parameter: KommunikationsWatchdog
|
Standardwert |
200 |
|
Wertebereich Schrittweite |
1...65,535 1 |
|
Einheit |
100 µs |
|
Beschreibung |
Definiert die maximale Zeitspanne, in der ein Consumer ein gültiges Datentelegramm von einem Producer empfangen muss, damit die sicherheitsbezogene Kommunikation als gültig betrachtet und die Applikation fortgesetzt wird. Der Parameter stellt einen Watchdog-Timer ein, der den rechtzeitigen Empfang der Telegramme vom Producer im Consumer überwacht. Läuft der Watchdog ab, so wird die Kommunikation als ungültig betrachtet. EcoStruxure Machine Expert - Safety verfügt über einen Berechnungsdialog für die Bestimmung dieses Parameterwertes. HINWEIS: Der Parameterwert beeinflusst die von EcoStruxure Machine Expert - Safety berechnete Safety-Reaktionszeit. Begriffsdefinition und Hintergrundinformation Gemäß openSAFETY-Spezifikation kommunizieren Geräte (sicherheitsbezogene I/O-Module und der Sichere Logik-Controller), indem sie zyklisch Daten, sogenannte openSAFETY-Telegramme, senden und empfangen. Ein Gerät, das Telegramme erzeugt (sendet), wird als Producer bezeichnet, ein empfangendes Gerät als Consumer. Der KommunikationsWatchdog-Wert hängt physikalisch von der Übertragungszeit ab, die für die Übertragung des Telegramms von einem Producer zu einem Consumer benötigt wird und beeinflusst die ungünstigste Gesamtreaktionszeit des Systems. Deshalb hängt der berechnete Wert vom Wert des Parameters MaxDatenübertragungszeit ab. Falls der Empfänger das Telegramm rechtzeitig erhält (KommunikationsWatchdog ist noch nicht abgelaufen und die Übertragungszeit liegt innerhalb der durch die Parameter MinDatenübertragungszeit und MaxDatenübertragungszeit vorgegeben Zeitgrenzen), wird der Watchdog-Timer erneut gestartet und die Kommunikation wird als gültig betrachtet. Der Zeitstempel im eingehenden Telegramm wird dabei nicht ausgewertet. Relevant ist nur, dass das Telegramm empfangen wird. Falls kein Telegramm empfangen wird (wegen Verzögerung oder Verlust) und der KommunikationsWatchdog im Consumer abläuft, nimmt das Modul seinen definierten sicheren Zustand ein. Dadurch steuert auch das Prozessdaten-Element 'SafeModuleOK' auf SAFEFALSE und zeigt damit an, dass die sicherheitsbezogene Kommunikation des Moduls nicht länger gültig ist. |
|
Berechnung der Werte |
So berechnen Sie den modulspezifischen KommunikationsWatchdog-Wert
|
|
Praktische Werte |
Für den KommunikationsWatchdog-Wert, den Sie in die Parametertabelle ('Geräte'-Fenster) eingeben müssen, gilt Folgendes:
|
Parameter: EncoderType
|
Standardwert |
Drehgeber |
|
Einheit |
-/- |
|
Beschreibung |
Spezifiziert den Encoder-Typ. |
|
Mögliche Werte |
|
Parameter: EncoderResolutionRotary
|
Standardwert |
128 |
|
Einheit |
Sin/Cos-Perioden pro Umdrehung |
|
Wertebereich Schrittweite |
16...1024 1 |
|
Beschreibung |
Spezifiziert die Encoder-Auflösung für Drehgeber. HINWEIS: Der Parameterwert ist nur relevant, wenn der Parameter EncoderType auf Drehgeber eingestellt ist. |
HINWEIS:
Informationen über die Encoder-Auflösung des eingesetzten Motors entnehmen Sie der Dokumentation des SH3/MH3-Motors, welche Teil der Online-Hilfe zu EcoStruxure Machine Expert ist (Lexium SH3 Motor - Produkthandbuch oder Lexium MH3 Motor - Produkthandbuch).
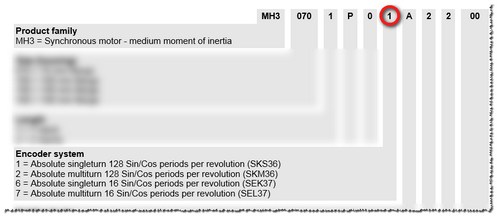
Bestimmen Sie die Auflösung wie folgt:
Ziffer 10 des Typcodes des Motors weist das eingebaute Encoder-System aus.
Im Abschnitt "Typcode" in Kapitel 1 der Dokumentation des Motors finden Sie die Anzahl der Sin/Cos-Perioden pro Umdrehung.
Auszug aus einer Motor-Dokumentation
Parameter: FeedConstantRotary
|
Standardwert |
360 |
|
Einheit |
Einheiten pro Umdrehung |
|
Wertebereich Schrittweite |
1...4.294.967.295 1 |
|
Beschreibung |
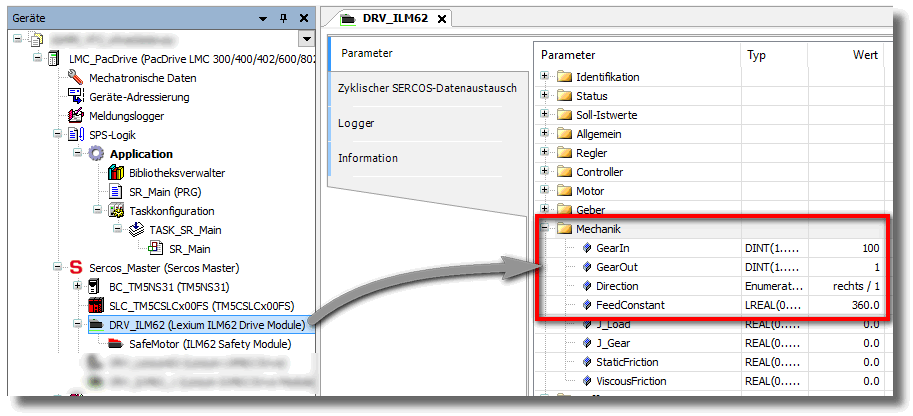
Spezifiziert die Vorschubkonstante für Drehgeber. Die Vorschubkonstante entspricht der Wegstrecke (in Einheiten), die mit einer Umdrehung der Antriebsachse zurückgelegt wird. Geben Sie hier denselben Wert ein, wie für den entsprechenden Drive-Parameter in EcoStruxure Machine Expert (siehe Bild unten). HINWEIS: Der Parameterwert ist nur relevant, wenn der Parameter EncoderType auf Drehgeber eingestellt ist. Weitere Informationen zu diesem Parameter entnehmen Sie dem entsprechenden Kapitel zum Drive in der EcoStruxure Machine Expert-Online-Hilfe. |
Drive-bezogene Parameter in EcoStruxure Machine Expert:
Parameter: GearIn
|
Standardwert |
1 |
|
Einheit |
Einheiten pro Umdrehung |
|
Wertebereich Schrittweite |
-2.147.483.646...2.147.483.647 1 |
|
Beschreibung |
Spezifiziert die Anzahl der eingangsseitigen Zähne des Getriebes auf Motorseite (IN in der nachfolgenden Grafik). Zusammen mit dem Parameter GearOut (siehe Beschreibung unten) definiert dieser Parameter das Übersetzungsverhältnis zwischen Motor und Last. 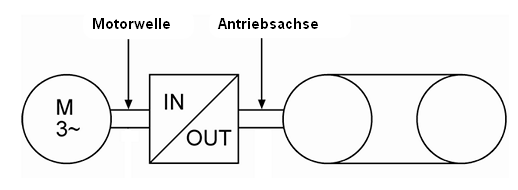
Geben Sie hier denselben Wert ein, wie für den entsprechenden Drive-Parameter in EcoStruxure Machine Expert (siehe Bild unten). Weitere Informationen zu diesem Parameter und wie Sie ihn berechnen, entnehmen Sie dem entsprechenden Kapitel zum Drive in der EcoStruxure Machine Expert-Online-Hilfe. |
Drive-bezogene Parameter in EcoStruxure Machine Expert:
Parameter: GearOut
|
Standardwert |
1 |
|
Einheit |
Einheiten pro Umdrehung |
|
Wertebereich Schrittweite |
-2.147.483.646...2.147.483.647 1 |
|
Beschreibung |
Spezifiziert die Anzahl der ausgangsseitigen Zähne des Getriebes auf Maschinenseite (OUT in der nachfolgenden Grafik). Zusammen mit dem Parameter GearIn (siehe Beschreibung oben) definiert dieser Parameter das Übersetzungsverhältnis zwischen Motor und Last.
Geben Sie hier denselben Wert ein, wie für den entsprechenden Drive-Parameter in EcoStruxure Machine Expert (siehe Bild unten). Weitere Informationen zu diesem Parameter und wie Sie ihn berechnen, entnehmen Sie dem entsprechenden Kapitel zum Drive in der EcoStruxure Machine Expert-Online-Hilfe. |
Drive-bezogene Parameter in EcoStruxure Machine Expert:
Parameter: EncoderResolutionLinear
|
Standardwert |
1000 |
|
Einheit |
Länge einer Periode in µm |
|
Wertebereich Schrittweite |
100...100000 1 |
|
Beschreibung |
Spezifiziert die Auflösung für lineare Encoder. 1 Einheit = definierte Periodenlänge in µm. HINWEIS: Der Parameterwert ist nur relevant, wenn der Parameter EncoderType auf Lineargeber eingestellt ist. |
Parameter: FeedConstantLinear
|
Standardwert |
1000 |
|
Einheit |
units/m |
|
Wertebereich Schrittweite |
1..4294967295 1 |
|
Beschreibung |
Spezifiziert die Vorschubkonstante für Lineargeber in units/m. Die Vorschubkonstante ist die Wegstrecke (in Einheiten), welche der Länge 1 m entspricht. Geben Sie hier denselben Wert ein, wie für den entsprechenden Drive-Parameter in EcoStruxure Machine Expert (siehe Bild unten). HINWEIS: Der Parameterwert ist nur relevant, wenn der Parameter EncoderType auf Lineargeber eingestellt ist. |
Drive-bezogene Parameter in EcoStruxure Machine Expert:
Parameter: EncoderDirection
|
Standardwert |
Nicht-invertiert |
|
Einheit |
-/- |
|
Beschreibung |
Spezifiziert die Richtung des Encoders (je nach Encoder-Typ). |
|
Mögliche Werte |
|
Parameter: PositionFilter
|
Standardwert |
2 |
|
Einheit |
ms |
|
Beschreibung |
Definiert die Filterzeit für den Positionswert, welcher aus den vom Encoder gelieferten Eingangswerten berechnet wird. Mit dem Filter lassen sich unerwünschte Interferenzpulse oder Rauschen im Encodersignal unterdrücken. Je höher der Wert, desto toleranter arbeitet das Sicherheitsmodul. Ein zu hoch eingestellter Filterwert kann jedoch dazu führen, dass Nutzimpulse im Encodersignal nicht erkannt werden. Da die Berechnung der Geschwindigkeit von der Encoder-Position abhängt, beeinflusst die Filterzeit auch den berechneten Geschwindigkeitswert. Der berechnete Geschwindigkeitswert dient wiederum als Eingangswert für die sicherheitsbezogenen Funktionen SOS, SS2 und SDI. Außerdem wird der Geschwindigkeitswert zur Überwachung der Abbremsrampe in allen sicherheitsbezogenen Funktionen benötigt sowie in der SLS- und SMS-Funktion zur Überwachung der Höchstgeschwindigkeit. |
|
Mögliche Werte |
Die Parameterwerte können aus einem Listenfeld ausgewählt werden (ENUM-Datentyp). Wählbare Werte sind: 2, 4, 8, 16, 32, 64. Beachten Sie den Gefahrenhinweis nach dieser Tabelle. |
WARNUNG
UNBEABSICHTIGTER BETRIEBSZUSTAND DES GERÄTS
Stellen Sie sicher, das der ausgewählte Zeitwert Ihrer Risikoanalyse entspricht.
Stellen Sie sicher, dass der eingestellte Zeitwert den Anforderungen an die Safety-Reaktionszeit Ihrer Applikation entspricht.
Stellen Sie sicher, dass Ihre Risikoanalyse eine Auswertung für den Fall eines falsch eingestellten Zeitwerts für diesen Parameter enthält.
Validieren Sie die gesamte sicherheitsbezogene Funktion in Bezug auf den eingestellten Zeitwert und prüfen Sie die Applikation sorgfältig.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Körperverletzungen oder Sachschäden zur Folge haben.
Die Parameter dieser Gruppe definieren die Sicherheitsfunktion Safe Stop 1 (SS1).
Parameter: SS1_StartDelayTime[t1]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...300.000 1 |
|
Einheit |
ms |
|
Beschreibung |
Spezifiziert die Verzögerungszeit, nach der die Überwachung der Sicherheitsfunktion gestartet wird. Dieser Wert muss der Zeitdauer entsprechen, die das gesamte Motion Control-System benötigt, um zu reagieren. Dies entspricht der Zeit, nach der die Standard-Steuerung die angeforderte Sicherheitsfunktion initiieren kann, nachdem sie die im Prozessdaten-Steuerwort kodierte Anforderung über den SERCOS-Bus empfangen hat. |
|
Mögliche Werte |
Der hier eingestellte Wert muss gleich oder größer als die Reaktionszeit des gesamten Systems sein, inklusive der Standard-Reaktionszeit des Systems. Der Wert darf nicht kleiner als die kürzest mögliche Reaktionszeit der beteiligten Komponenten sein, d.h. der früheste Zeitpunkt, bei dem der Antrieb abbremsen kann. |
Parameter: SS1_RampMonitoring
|
Standardwert |
Deaktiviert |
|
Einheit |
-/- |
|
Beschreibung |
Aktiviert oder deaktiviert die Rampenüberwachung, d.h. die Überwachung der Abbremskurve. |
|
Mögliche Werte |
|
Parameter: SS1_MaxRampVelocity[v1]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...65.535 1 |
|
Einheit |
units/s |
|
Beschreibung |
Der Parameter ist nur relevant, wenn die Rampenüberwachung aktiviert ist (siehe vorheriger Parameter). Der Wert beeinflusst die Steigung der Abbremsrampe (siehe Parameter SS1_RampMonitoring). |
Parameter: SS1_RampMonitoringTime[t2]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...300.000 1 |
|
Einheit |
units/s |
|
Beschreibung |
Spezifiziert die Dauer in Millisekunden, nach der Geschwindigkeit Null erreicht werden muss (t2 in der Abbildung) und STO aktiviert wird. 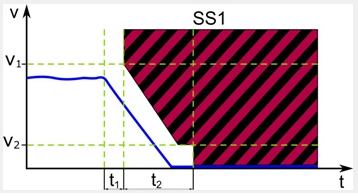
Falls die Rampenüberwachung aktiviert ist, beeinflusst der Wert die Steigung der Abbremsrampe (siehe Parameter SS1_RampMonitoring). |
Parameter: SS1_MinRampVelocity[v2]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...65.535 1 |
|
Einheit |
units/s |
|
Beschreibung |
Spezifiziert die erlaubte Geschwindigkeitsabweichung (d.h. maximale Geschwindigkeit) während des Stillstands (v2 in der Abbildung). Falls die Abweichung den definierten Wert übersteigt, wird die STO-Funktion als Fallback aktiviert.
Bei der Funktion SS1, wird die Position überwacht, nachdem Geschwindigkeit Null erreicht wurde und während t2 noch nicht abgelaufen ist, d.h. solange STO noch nicht aktiv ist. Falls die Rampenüberwachung aktiviert ist, beeinflusst der Wert die Steigung der Abbremsrampe (siehe Parameter SS1_RampMonitoring). |
HINWEIS:
Die SS1-Funktion verhält sich wie die STO-Funktion, falls keine Werte im entsprechenden Geräteparameter-Bereich vorgegeben sind oder falls SS1_StartDelayTime[t1] und SS1_RampMonitoringTime[t2] auf 0 eingestellt sind.
Die Parameter dieser Gruppe definieren die Sicherheitsfunktion Safe Stop 2 (SS2).
Parameter: SS2_StartDelayTime[t1]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...300.000 1 |
|
Einheit |
ms |
|
Beschreibung |
Spezifiziert die Verzögerungszeit, nach der die Überwachung der Sicherheitsfunktion gestartet wird. Dieser Wert muss der Zeitdauer entsprechen, die das gesamte Motion Control-System benötigt, um zu reagieren. Dies entspricht der Zeit, nach der die Standard-Steuerung die angeforderte Sicherheitsfunktion initiieren kann, nachdem sie die im Prozessdaten-Steuerwort kodierte Anforderung über den SERCOS-Bus empfangen hat. |
|
Mögliche Werte |
Der hier eingestellte Wert muss gleich oder größer als die Reaktionszeit des gesamten Systems sein, inklusive der Standard-Reaktionszeit des Systems. Der Wert darf nicht kleiner als die kürzest mögliche Reaktionszeit der beteiligten Komponenten sein, d.h. der früheste Zeitpunkt, bei dem der Antrieb abbremsen kann. |
Parameter: SS2_RampMonitoring
|
Standardwert |
Deaktiviert |
|
Einheit |
-/- |
|
Beschreibung |
Aktiviert oder deaktiviert die Rampenüberwachung, d.h. die Überwachung der Abbremskurve. |
|
Mögliche Werte |
|
Parameter: SS2_MaxRampVelocity[v1]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...65.535 1 |
|
Einheit |
units/s |
|
Beschreibung |
Der Parameter ist nur relevant, wenn die Rampenüberwachung aktiviert ist (siehe vorheriger Parameter). Der Wert beeinflusst die Steigung der Abbremsrampe (siehe Parameter SS2_RampMonitoring). |
Parameter: SS2_RampMonitoringTime[t2]
|
Standardwert |
Deaktiviert |
|
Wertebereich Schrittweite |
0...300.000 1 |
|
Einheit |
units/s |
|
Beschreibung |
Spezifiziert die Dauer in Millisekunden, nach der Geschwindigkeit Null erreicht werden muss (t2 in der Abbildung) und die SS2-Stillstandsüberwachung (ähnlich SOS) aktiviert ist. 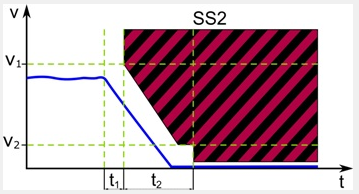
Falls die Rampenüberwachung aktiviert ist, beeinflusst der Wert die Steigung der Abbremsrampe (siehe Parameter SS2_RampMonitoring). |
Parameter: SS2_MaxRampVelocity[v2]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...65.535 1 |
|
Einheit |
units/s |
|
Beschreibung |
Spezifiziert die erlaubte Geschwindigkeitsabweichung (d.h. maximale Geschwindigkeit) während des Stillstands (v2 in der Abbildung). Falls die Abweichung den definierten Wert übersteigt, wird die STO-Funktion als Fallback aktiviert.
Bei der Funktion SS2, wird die Position überwacht, nachdem Geschwindigkeit Null erreicht wurde und während t2 noch nicht abgelaufen ist, d.h. solange die SS2-Stillstandsüberwachung (ähnlich zu SOS) noch nicht aktiv ist. Falls die Rampenüberwachung aktiviert ist, beeinflusst der Wert die Steigung der Abbremsrampe (siehe Parameter SS2_RampMonitoring). |
Parameter: SS2_PositionTolerance[sTol]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...65.535 1 |
|
Einheit |
units |
|
Beschreibung |
Spezifiziert die erlaubte Abweichung von der überwachten Stillstandsposition. Falls die Abweichung den definierten Wert übersteigt, wird die STO-Funktion als Fallback aktiviert. |
HINWEIS:
Die Funktion SS2 agiert wie eine Funktion SOS, falls im entsprechenden Geräteparameterbereich keine Werte festgelegt sind.
Die Parameter dieser Gruppe definieren die Sicherheitsfunktion Safe Limited Speed (SLS).
Das Safety-Modul bietet vier separate SLS-Funktionen: SLS1 bis SLS4. Sie lassen sich mit separaten Parametern konfigurieren, d.h. jeder Parameter ist für jede SLS-Funktion verfügbar. In den folgenden Beschreibungen steht * als Platzhalter für SLS1 bis SLS4.
Parameter: SLS*_StartDelayTime[t1]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...300.000 1 |
|
Einheit |
ms |
|
Beschreibung |
Spezifiziert die Verzögerungszeit, nach der die Überwachung der Sicherheitsfunktion gestartet wird. Dieser Wert muss der Zeitdauer entsprechen, die das gesamte Motion Control-System benötigt, um zu reagieren. Dies entspricht der Zeit, nach der die Standard-Steuerung die angeforderte Sicherheitsfunktion initiieren kann, nachdem sie die im Prozessdaten-Steuerwort kodierte Anforderung über den SERCOS-Bus empfangen hat. |
|
Mögliche Werte |
Der hier eingestellte Wert muss gleich oder größer als die Reaktionszeit des gesamten Systems sein, inklusive der Standard-Reaktionszeit des Systems. Der Wert darf nicht kleiner als die kürzest mögliche Reaktionszeit der beteiligten Komponenten sein, d.h. der früheste Zeitpunkt, bei dem der Antrieb abbremsen kann. |
Parameter: SLS*_RampMonitoring
|
Standardwert |
Deaktiviert |
|
Einheit |
-/- |
|
Beschreibung |
Aktiviert oder deaktiviert die Rampenüberwachung, d.h. die Überwachung der Abbremskurve. |
|
Mögliche Werte |
|
Parameter: SLS*_MaxRampVelocity[v1]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...65.535 1 |
|
Einheit |
units/s |
|
Beschreibung |
Der Parameter ist nur relevant, wenn die Rampenüberwachung aktiviert ist (siehe vorheriger Parameter). Der Wert beeinflusst die Steigung der Abbremsrampe (siehe Parameter SLS*_RampMonitoring). |
Parameter: SLS*_RampMonitoringTime[t2]
|
Standardwert |
Deaktiviert |
|
Wertebereich Schrittweite |
0...300.000 1 |
|
Einheit |
units/s |
|
Beschreibung |
Spezifiziert die Dauer in Millisekunden, nach der die Zielgeschwindigkeit (Parameter SLS*_Speed[v2]) erreicht werden muss (t2 in der Abbildung). 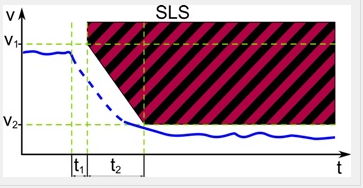
Falls die Rampenüberwachung aktiviert ist, beeinflusst der Wert die Steigung der Abbremsrampe (siehe Parameter SLS*_RampMonitoring). |
Parameter: SLS*_Speed[v2]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...65.535 1 |
|
Einheit |
units/s |
|
Beschreibung |
Definiert die finale Zielgeschwindigkeit, die spätestens nach der Zeit t2 erreicht werden muss und dann überwacht wird, solange SLS aktiv bleibt. Der Wert Einheit hängt von der Auflösung des Drehgebers ab. Falls die Rampenüberwachung aktiviert ist, beeinflusst der Wert die Steigung der Abbremsrampe (siehe Parameter SLS*_RampMonitoring). |
HINWEIS:
Wenn die SLS-Funktion verwendet wird, muss auch die SS1-Funktion parametriert werden.
Die Parameter dieser Gruppe definieren die Sicherheitsfunktion Safe Operating Stop (SOS).
Parameter: SOS_StartDelayTime[t1]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...300.000 1 |
|
Einheit |
ms |
|
Beschreibung |
Spezifiziert die Verzögerungszeit, nach der die Überwachung der Sicherheitsfunktion gestartet wird. Dieser Wert muss der Zeitdauer entsprechen, die das gesamte Motion Control-System benötigt, um zu reagieren. Dies entspricht der Zeit, nach der die Standard-Steuerung die angeforderte Sicherheitsfunktion initiieren kann, nachdem sie die im Prozessdaten-Steuerwort kodierte Anforderung über den SERCOS-Bus empfangen hat. |
|
Mögliche Werte |
Der hier eingestellte Wert muss gleich oder größer als die Reaktionszeit des gesamten Systems sein, inklusive der Standard-Reaktionszeit des Systems. Der Wert darf nicht kleiner als die kürzest mögliche Reaktionszeit der beteiligten Komponenten sein, d.h. der früheste Zeitpunkt, bei dem der Antrieb abbremsen kann. |
Parameter: SOS_PositionTolerance[sTol]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...65.535 1 |
|
Einheit |
units |
|
Beschreibung |
Definiert die erlaubte Abweichung von der überwachten Stillstandsposition (STol in der Abbildung). Falls die Abweichung den definierten Wert übersteigt, wird die STO-Funktion als Fallback aktiviert. 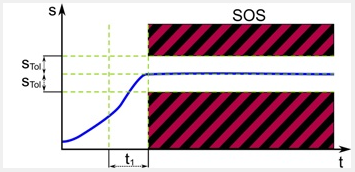
|
Die Parameter dieser Gruppe definieren die Sicherheitsfunktion Safe Maximum Speed (SMS).
Parameter: SMS_MaxSpeed
|
Standardwert |
100 |
|
Wertebereich Schrittweite |
0...65.535 1 |
|
Einheit |
units/s |
|
Beschreibung |
Definiert die sichere maximale Geschwindigkeit, die zu keiner Zeit überschritten werden darf. Der Wert units/s hängt von der Auflösung des Drehgebers ab. 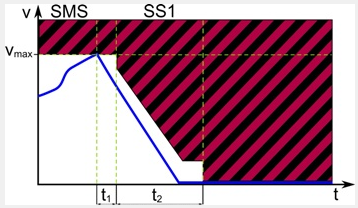
|
Die Parameter dieser Gruppe definieren die Sicherheitsfunktion Safe Direction (SDI). Sie gelten für beide Funktionen SDIneg und SDIpos. Obwohl diese identisch parametriert werden, können sie unabhängig voneinander angefordert werden.
Parameter: SDI_StartDelayTime[t1]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...300.000 1 |
|
Einheit |
ms |
|
Beschreibung |
Spezifiziert die Verzögerungszeit, nach der die Überwachung der Sicherheitsfunktion gestartet wird. Dieser Wert muss der Zeitdauer entsprechen, die das gesamte Motion Control-System benötigt, um zu reagieren. Dies entspricht der Zeit, nach der die Standard-Steuerung die angeforderte Sicherheitsfunktion initiieren kann, nachdem sie die im Prozessdaten-Steuerwort kodierte Anforderung über den SERCOS-Bus empfangen hat. |
|
Mögliche Werte |
Der hier eingestellte Wert muss gleich oder größer als die Reaktionszeit des gesamten Systems sein, inklusive der Standard-Reaktionszeit des Systems. Der Wert darf nicht kleiner als die kürzest mögliche Reaktionszeit der beteiligten Komponenten sein, d.h. der früheste Zeitpunkt, bei dem der Antrieb abbremsen kann. |
Parameter: SDI_PositionTolerance[sTol]
|
Standardwert |
0 |
|
Wertebereich Schrittweite |
0...65.535 1 |
|
Einheit |
units |
|
Beschreibung |
Definiert die erlaubte Abweichung von der überwachten Position, um die Richtung zu bestimmen (STol in der oberen Abbildung). Falls die Abweichung den definierten Wert nach Ablauf von t1 überschreitet, wird die SS1-Funktion als Fallback aktiviert. 
|
Prozessdaten-Elemente des Moduls
Zweck und Verwendung von Prozessdaten-Elementen
Jedes Modul verfügt über Prozessdaten-Elemente (Signale). Prozessdaten-Elemente können sein:
I/O-Signale, die von einer Anschlussklemme des Moduls gelesen oder auf diese geschrieben werden.
Diagnosesignale zur Auswertung des Status eines Eingangs-/Ausgangssignals oder des gesamten Moduls.
Steuersignale, um beispielsweise einen Kanal freizugeben oder das Modul einzustellen.
Die verfügbaren Prozessdaten-Elemente eines Moduls sind unter dem Modulknoten im Baum links im 'Geräte'-Fenster aufgelistet. Um ein Prozessdaten-Element anzuzeigen und zu verwenden, erweitern Sie den Modulknoten im Baum durch Anklicken des '+'-Symbols.
Beispiel
|
Das Modul mit der Kennung SL1.SM3 stellt (unter anderem) das Diagnosesignal SafeModuleOK und das Eingangssignal SafeDigitalInput01 zur Verfügung. 
|
Sie können Prozessdaten-Elemente aus dem Baum per Drag & Drop in den sicherheitsbezogenen FBS/KOP-Code einfügen (siehe folgende Anweisung). Beim Einfügen in den Code, wird eine (nicht-sicherheitsbezogene) Standard-Variable oder eine sicherheitsbezogene Variable erzeugt (je nach Datentyp des Prozessdaten-Elements).
Vorgehensweise: So fügen Sie Prozessdaten-Elemente in den Code ein
|
Datenrichtung hängt vom Signaltyp an
Eingangssignale können von der sicherheitsbezogenen Applikation nur gelesen werden, Ausgangssignale können geschrieben werden.
Diagnosesignale dienen zur Auswertung und Überwachung des sicherheitsbezogenen Moduls oder beispielsweise auch einzelner I/O-Kanäle. Deshalb können globale Variablen, die für Diagnosesignale erzeugt wurden und diesen zugeordnet sind, von der Applikation nur gelesen werden.
Mit Steuersignalen lässt sich das Modul freigeben oder auf den aktuellen Anwendungsfall anpassen (beispielsweise durch Einstellen eines Messbereichs oder eines bestimmten Modulverhaltens). Globale Variablen, die für ein Steuersignal erzeugt wurden und diesem zugeordnet sind, können von der Applikation geschrieben werden und dadurch das Modul steuern.
Darstellung von Prozessdaten-Elementen im Gerätebaum:
|
Symbol |
Signaltyp |
Zugriffsart |

|
Sicherheitsbezogenes Eingangssignal oder Diagnosesignal. |
Lesen |

|
Standard-Eingangssignal (nur für den Sicheren Logik-Controller verfügbar). |
Lesen |

|
Standard-Ausgangssignal (nur für den Sicheren Logik-Controller verfügbar) oder Steuersignal. |
Schreiben |

|
Sicherheitsbezogenes Ausgangssignal oder Steuersignal. |
Schreiben |
HINWEIS:
Wird ein Standard-Signal (nicht-sicherheitsbezogen) mit einem physikalischen Eingang oder Ausgang verbunden, muss der Datentyp der zugehörigen globalen Variablen von sicherheitsbezogen nach Standard konvertiert werden (z.B. von SAFEBOOL nach BOOL), um eine falsche Verwendung des Signals im Code auszuschließen. Dasselbe gilt, wenn ein sicherheitsbezogenes Signal im Code nur als Standard-Signal verwendet wird. Die Änderung des Datentyps kann entweder im zugehörigen Variablen-Arbeitsblatt oder mit Hilfe der Funktionen zur Typumwandlung erfolgen.
WARNUNG
UNBEABSICHTIGTER BETRIEBSZUSTAND DES GERÄTS
Verifizieren Sie die Auswirkung von Standard-Signalen (nicht-sicherheitsbezogen) auf sicherheitsbezogene Ausgänge.
Verifizieren Sie, dass die Funktionen zur Umwandlung von "Standard auf sicherheitsbezogen" im Code korrekt verwendet werden.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Körperverletzungen oder Sachschäden zur Folge haben.
Nachfolgend sind die I/O-Signale, die Diagnosesignale und die Steuersignale jedes Moduls aufgelistet (in der Reihenfolge wie im Gerätebaum).
SafeModuleOK
|
Beschreibung |
Zeigt den Status der Kommunikation zwischen dem sicherheitsbezogenen Modul und dem Sicheren Logik-Controller an und gibt somit, aus Sicht der sicherheitsbezogenen Applikation, den Modulstatus an. |
|
Signaltyp |
Diagnose |
|
Datentyp |
SAFEBOOL |
|
Zugriffsart |
Variable kann von der sicherheitsbezogenen Applikation gelesen werden |
|
Mögliche Werte |
SAFEFALSE:
SAFETRUE:
|
Verpflichtende Zuweisungskontrolle für das Prozessdaten-Element SafeModuleOK:
Die Verifizierung/Validierung der Zuordnung zwischen Prozessdaten-Elementen und globalen I/O-Variablen ist verpflichtend. Dies gilt insbesondere für das Prozessdatenelement SafeModuleOK, welches für jedes sicherheitsbezogene Modul verfügbar ist und dessen Status meldet. Da das Prozessdatum SafeModuleOK nicht geschrieben werden kann, z.B. durch Anlegen eines Signals an einen Moduleingang, muss das zu prüfende Modul physikalisch vom TM5-Bus entfernt, d.h. abgezogen werden. Als Folge dieses Abziehens schaltet SafeModuleOK auf SAFEFALSE, und die zugewiesene globale Variable muss diesem Wechsel folgen. Weitere Informationen zum Aus- und Wiedereinbau eines Moduls entnehmen Sie bitte der Bedienungsanleitung des betreffenden Moduls.
WARNUNG
UNBEABSICHTIGTER BETRIEBSZUSTAND DES GERÄTS
Entfernen Sie jedes sicherheitsbezogene Modul vom TM5-Bus, um den Zustand von SafeModuleOK zu prüfen.
Prüfen Sie, ob die globale I/O-Variable, die dem Prozessdaten-Element SafeModuleOK des entfernten Moduls zugewiesen ist, auf SAFEFALSE wechselt.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Körperverletzungen oder Sachschäden zur Folge haben.
SafeAxisIn
|
Beschreibung |
Gibt die Kennung der zu überwachenden Achse an. Verbinden Sie dieses Signal mit dem S_AxisIN-Eingang des Preventa SF_SafeMotionControl-Funktionsbausteins in Ihrer sicherheitsbezogenen Applikation. So wird eine eindeutige Verknüpfung zwischen Funktionsbaustein und der betreffenden Achse und folglich auch zwischen Achse und Steuerung hergestellt. |
|
Signaltyp |
Diagnose |
|
Datentyp |
SAFEDWORD Anfangswert: 0x0 |
|
Zugriffsart |
Variable kann von der sicherheitsbezogenen Applikation gelesen werden |
WARNUNG
UNBEABSICHTIGTER BETRIEBSZUSTAND DES GERÄTS
Prüfen und korrigieren Sie, falls erforderlich, die Zuordnung des korrekten Datenelements des verwendeten Safety-Moduls, um sicherzustellen, dass die richtige Achse gesteuert wird.
Validieren Sie die Sicherheitsarchitektur und prüfen Sie die Applikation sorgfältig.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Körperverletzungen oder Sachschäden zur Folge haben.
SafeFeedback
|
Beschreibung |
Zeigt entweder die berechnete Geschwindigkeit (in [units/s]) an oder die Anzahl an Inkrementen, die vom Encoder der überwachten Achse geliefert werden. Welcher Wert angezeigt wird, hängt von der Einstellung des Parameters SafeFeedbackConfig ab (siehe Beschreibung oben).
Werten Sie dieses Prozessdaten-Element zur Überwachung der Achsbewegung in Ihrer sicherheitsbezogenen Applikation aus. |
|
Signaltyp |
Diagnose |
|
Datentyp |
SAFEDINT Anfangswert: 0 |
|
Zugriffsart |
Variable kann von der sicherheitsbezogenen Applikation gelesen werden |
WARNUNG
UNBEABSICHTIGTER BETRIEBSZUSTAND DES GERÄTS
Stellen Sie sicher, dass dem Prozessdaten-Element SafeFeedback mit Hilfe des Modulparameters SafeFeedbackConfig der korrekte Wert (Geschwindigkeit oder Encoder-Inkremente) zugeordnet ist.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Körperverletzungen oder Sachschäden zur Folge haben.
SafeAxisOut
|
Beschreibung |
Gibt die zu steuernde und zu überwachende Achse an. Verbinden Sie dieses Signal mit dem S_AxisOUT-Ausgang des Preventa SF_SafeMotionControl-Funktionsbausteins in Ihrer sicherheitsbezogenen Applikation. HINWEIS: Dieser Ausgang darf nicht unverbunden bleiben. |
|
Signaltyp |
Steuersignal |
|
Datentyp |
SAFEDWORD Anfangswert: 0x0 |
|
Zugriffsart |
Variable kann von der sicherheitsbezogenen Applikation geschrieben werden |
WARNUNG
UNBEABSICHTIGTER BETRIEBSZUSTAND DES GERÄTS
Prüfen und korrigieren Sie, falls erforderlich, die Zuordnung des korrekten Datenelements SafeAxisOut des verwendeten Safety-Moduls, um sicherzustellen, dass die richtige Achse gesteuert wird.
Validieren Sie die Sicherheitsarchitektur und prüfen Sie die Applikation sorgfältig.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Körperverletzungen oder Sachschäden zur Folge haben.
Anzeige des Funktionsstatus
Ob eine sicherheitsbezogene Funktion aktiv ist oder nicht, wird an den Ausgangsformalparametern des Funktionsbausteins (Motion FB) Preventa SF_SafeMotionControl angezeigt und nicht über Prozessdaten-Elemente. Pro Funktion ist dort ein SAFEBOOL-Ausgang vorhanden, der von der sicherheitsbezogenen Applikation gelesen und ausgewertet werden kann. Darüber hinaus sind Ausgänge verfügbar, die den Status der Rampenüberwachung sowie den gesamten Status der Sicherheitsfunktion anzeigen.
Weitere Informationen
Weitere Informationen zu den Statusausgängen finden Sie im Hilfekapitel "Preventa Motion FB SF_SafeMotionControl".

