IF_RobotConfiguration - Scara4Ax (Methode)
|
Typ: |
Methode |
|
Verfügbar ab: |
V2.8.2.0 |
Roboter jeden Typs bringen grundsätzlich Gefahren für die Maschinenbediener und das Wartungspersonal mit sich. Einige dieser Gefahren sind unter Umständen auf eine unsachgemäße/ungültige Programmierkontrolle oder Systemparametrierung/-konfiguration zurückzuführen. Um diese Gefahren bzw. Situationen weitmöglichst zu vermeiden, wurde die Bibliothek SchneiderElectricRobotics speziell für die Schneider Electric-Roboter entwickelt.
|
|
|
UNBEABSICHTIGTER ROBOTERBETRIEB |
|
Stellen Sie sicher, dass die Bibliothek SchneiderElectricRobotics für den Betrieb eines Schneider Electric-Roboters verwendet wird. |
|
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Verletzungen oder Sachschäden zur Folge haben. |
Die Bibliothek SchneiderElectricRobotics erleichtert folgende Aufgaben:
oParametrierung des Roboters
oÜberwachung der Achsparameter des Roboters
oGearIn und GearOut
oFeedConstant
oHöchststrom
oDirection
oHöchstgeschwindigkeit
oÜberwachung des Arbeitsbereichs des Roboters
Dieses Kapitel enthält Informationen zu folgenden Aspekten:
Konfigurieren eines Vier-Achs-SCARA-Roboters.
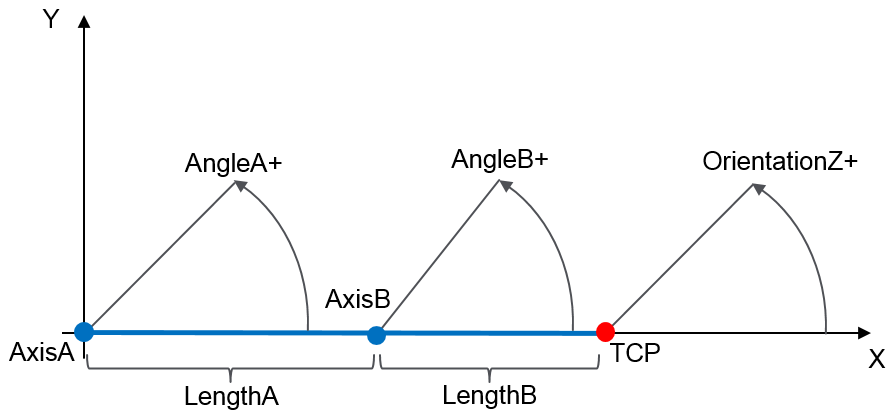
Mit der Methode Scara4Ax(...) kann der Roboter als Vier-Achs-SCARA (Selective Compliance Assembly Robot Arm) mit vier Freiheitsgraden konfiguriert werden.
Im Falle einer Kopplung der Übersetzung entlang der Z-Achse und der TCP-Orientierung (Tool Center Point/Arbeitspunkt) kann eine benutzerspezifische Transformation über die Methode AdditionalTransformationAxes() von IF_RobotConfigurationAdvanced eingeführt werden.
HINWEIS: Wurde eine Methode zur Konfiguration einer Transformation einmal erfolgreich (q_etDiag = GD.ET_Diag.Ok UND q_etDiagExt = ET_DiagExt.Ok) aufgerufen, so ist es nicht möglich, durch Aufruf einer weiteren Methode zur Konfiguration einer Transformation die Parametrierung zu überschreiben.
|
Eingang |
Datentyp |
Beschreibung |
|---|---|---|
|
i_ifDriveA |
Antrieb der Achse A |
|
|
i_ifDriveB |
SystemConfigurationItf.IF_Drive |
Antrieb der Achse B |
|
i_ifDriveC |
SystemConfigurationItf.IF_Drive |
Antrieb der Achse C |
|
i_ifDriveD |
SystemConfigurationItf.IF_Drive |
Antrieb der Achse D |
|
i_lrLengthA |
LREAL |
Länge des Arms, der an Achse A montiert ist. Wertebereich: i_lrLengthA > 0 Einheit: [mm] |
|
i_lrLengthB |
LREAL |
Länge des Arms, der an Achse B montiert ist. Wertebereich: i_lrLengthB > 0 Einheit: [mm] |
|
Ausgang |
Datentyp |
Beschreibung |
|---|---|---|
|
q_etDiag |
Allgemeingültige, bibliotheksunabhängige Aussage zur Diagnose. Ein Wert ungleich ET_Diag.Ok entspricht einer Diagnosemeldung. |
|
|
q_etDiagExt |
Bausteinspezifischer Ausgang zur Diagnose. q_etDiag = ET_Diag.Ok -> Statusmeldung q_etDiag <> ET_Diag.Ok -> Diagnosemeldung |
|
|
q_sMsg |
STRING[80] |
Ereignisabhängige Meldung, die zusätzliche Informationen über den Diagnosezustand gibt. |
|
q_etDiag |
q_etDiagExt |
Enumerationswert |
Beschreibung |
|---|---|---|---|
|
OK |
0 |
Ok |
|
|
ExecutionAborted |
105 |
Die Konfiguration ist bereits abgeschlossen. |
|
|
ExecutionAborted |
106 |
Die Transformation ist bereits konfiguriert. |
|
|
InputParameterInvalid |
36 |
Der Antrieb A wird bereits verwendet. |
|
|
InputParameterInvalid |
48 |
Der Antrieb A ist ungültig. |
|
|
InputParameterInvalid |
37 |
Der Antrieb B wird bereits verwendet. |
|
|
InputParameterInvalid |
49 |
Der Antrieb B ist ungültig. |
|
|
InputParameterInvalid |
38 |
Der Antrieb C wird bereits verwendet. |
|
|
InputParameterInvalid |
50 |
Der Antrieb C ist ungültig. |
|
|
InputParameterInvalid |
96 |
Der Antrieb D wird bereits verwendet. |
|
|
InputParameterInvalid |
93 |
Der Antrieb D ist ungültig. |
|
|
InputParameterInvalid |
160 |
LengthA liegt außerhalb des gültigen Bereichs. |
|
|
InputParameterInvalid |
161 |
LengthB liegt außerhalb des gültigen Bereichs. |
|
Enumerationsname: |
Ok |
|
Enumerationswert: |
0 |
|
Beschreibung: |
Ok |
Die Konfiguration der Robotertransformation war erfolgreich.
|
Enumerationsname: |
ConfigurationAlreadyCompleted |
|
Enumerationswert: |
105 |
|
Beschreibung: |
Die Konfiguration ist bereits abgeschlossen. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Die Konfiguration der Robotertransformation war nicht erfolgreich. |
Die Konfiguration des Roboters ist bereits abgeschlossen. Die Methode ConfigDone(...) wurde bereits erfolgreich aufgerufen. |
Sicherstellen, dass keine Methode zur Transformationskonfiguration, zum Beispiel Delta3Ax(...) oder AddAuxAx(...), aufgerufen wird, nachdem die Konfiguration abgeschlossen ist. |
TransformationAlreadyConfigured
|
Enumerationsname: |
TransformationAlreadyConfigured |
|
Enumerationswert: |
106 |
|
Beschreibung: |
Die Transformation ist bereits konfiguriert. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Die Konfiguration der Robotertransformation war nicht erfolgreich. |
Die Konfiguration der Transformation des Roboters wurde bereits erfolgreich durchgeführt. |
Darauf achten, dass eine Transformationskonfiguration nur einmal aufgerufen wird. |
|
Enumerationsname: |
DriveAAlreadyInUse |
|
Enumerationswert: |
36 |
|
Beschreibung: |
Der Antrieb A wird bereits verwendet. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Die Konfiguration der Robotertransformation war nicht erfolgreich. |
Der am Eingang i_ifDriveA übergebene Antrieb ist bereits im Roboter konfiguriert und kann nicht noch einmal verwendet werden. |
Sicherstellen, dass dem Roboter kein Antrieb mehrmals zugewiesen wird. Ist das der Fall, dann berichtigen Sie dies. |
|
Enumerationsname: |
DriveAInvalid |
|
Enumerationswert: |
48 |
|
Beschreibung: |
Der Antrieb A ist ungültig. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Die Konfiguration der Robotertransformation war nicht erfolgreich. |
Der am Eingang i_ifDriveA übergebene Schnittstelle ist ungültig. |
Am Eingang i_ifDriveA muss ein gültiger Antrieb übergeben werden. |
|
Enumerationsname: |
DriveBAlreadyInUse |
|
Enumerationswert: |
37 |
|
Beschreibung: |
Der Antrieb B wird bereits verwendet. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Die Konfiguration der Robotertransformation war nicht erfolgreich. |
Der am Eingang i_ifDriveB übergebene Antrieb ist bereits im Roboter konfiguriert und kann nicht noch einmal verwendet werden. |
Sicherstellen, dass dem Roboter kein Antrieb mehrmals zugewiesen wird. Ist das der Fall, dann berichtigen Sie dies. |
|
Enumerationsname: |
DriveBInvalid |
|
Enumerationswert: |
49 |
|
Beschreibung: |
Der Antrieb B ist ungültig. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Die Konfiguration der Robotertransformation war nicht erfolgreich. |
Der am Eingang i_ifDriveB übergebene Schnittstelle ist ungültig. |
Am Eingang i_ifDriveB muss ein gültiger Antrieb übergeben werden. |
|
Enumerationsname: |
DriveCAlreadyInUse |
|
Enumerationswert: |
38 |
|
Beschreibung: |
Der Antrieb C wird bereits verwendet. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Die Konfiguration der Robotertransformation war nicht erfolgreich. |
Der am Eingang i_ifDriveC übergebene Antrieb ist bereits im Roboter konfiguriert und kann nicht noch einmal verwendet werden. |
Sicherstellen, dass dem Roboter kein Antrieb mehrmals zugewiesen wird. Ist das der Fall, dann berichtigen Sie dies. |
|
Enumerationsname: |
DriveCInvalid |
|
Enumerationswert: |
50 |
|
Beschreibung: |
Der Antrieb C ist ungültig. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Die Konfiguration der Robotertransformation war nicht erfolgreich. |
Der am Eingang i_ifDriveC übergebene Schnittstelle ist ungültig. |
Am Eingang i_ifDriveC muss ein gültiger Antrieb übergeben werden. |
|
Enumerationsname: |
DriveDAlreadyInUse |
|
Enumerationswert: |
96 |
|
Beschreibung: |
Der Antrieb D wird bereits verwendet. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Die Konfiguration der Robotertransformation war nicht erfolgreich. |
Der am Eingang i_ifDriveD übergebene Antrieb ist bereits im Roboter konfiguriert und kann nicht noch einmal verwendet werden. |
Sicherstellen, dass dem Roboter kein Antrieb mehrmals zugewiesen wird. Ist das der Fall, dann berichtigen Sie dies. |
|
Enumerationsname: |
DriveDInvalid |
|
Enumerationswert: |
93 |
|
Beschreibung: |
Der Antrieb D ist ungültig. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Die Konfiguration der Robotertransformation war nicht erfolgreich. |
Der am Eingang i_ifDriveD übergebene Schnittstelle ist ungültig. |
Am Eingang i_ifDriveD muss ein gültiger Antrieb übergeben werden. |
|
Enumerationsname: |
LengthARange |
|
Enumerationswert: |
160 |
|
Beschreibung: |
LengthA liegt außerhalb des gültigen Bereichs. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Die Konfiguration der Robotertransformation war nicht erfolgreich. |
Der am Eingang i_lrLengthA übergebene Wert liegt außerhalb des gültigen Bereichs. |
Am Eingang i_lrLengthA muss ein Wert größer als 0 übergeben werden. |
|
Enumerationsname: |
LengthBRange |
|
Enumerationswert: |
161 |
|
Beschreibung: |
LengthB liegt außerhalb des gültigen Bereichs. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Die Konfiguration der Robotertransformation war nicht erfolgreich. |
Der am Eingang i_lrLengthB übergebene Wert liegt außerhalb des gültigen Bereichs. |
Am Eingang i_lrLengthB muss ein Wert größer als 0 übergeben werden. |
