FB_MotorDataDelete - Allgemeine Informationen
|
Typ |
Funktionsbaustein |
|
Verfügbar ab |
V1.0.0.0 |
|
Übernommen aus: |
– |
|
Implementiert: |
– |
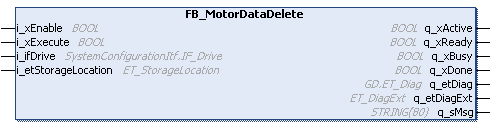
Dieser Funktionsbaustein löscht die Motordaten im Antrieb oder im Motorgeber, je nach ausgewählter i_etStorageLocation.
HINWEIS: Führen Sie diese POU nur dann aus, wenn die Anforderungen der Steuerung es erfordern. Der Speicherbereich des Gebers verfügt über eine begrenzte Anzahl an Schreibzyklen. Eine häufige Ausführung der POU kann zu Schäden am Geber führen.
Sercos muss in Phase 2 sein.
Dieser Funktionsbaustein löscht die Motordaten im ausgewählten Speicherort. Nach dem Löschen der alten Motordaten können mithilfe von FB_MotorDataWrite neue Motordaten in die Achse geschrieben werden.
HINWEIS: Die POU hat eine lange Verarbeitungszeit (> 1 s). Sie sollte deshalb in einer nicht zeitkritischen Task und mit einer entsprechenden Watchdog-Zeit ausgeführt werden.
|
Eingabe |
Datentyp |
Beschreibung |
|---|---|---|
|
i_xEnable |
BOOL |
Eine steigende Flanke FALSE -> TRUE aktiviert die POU, eine fallende Flanke TRUE -> FALSE deaktiviert sie. Wenn die POU abgeschaltet ist, führt sie keine Aktionen aus. |
|
i_xExecute |
BOOL |
FALSE -> TRUE: Der Baustein löscht die Motordaten in der ausgewählten Achse. Während der Löschvorgang läuft, ist q_xBusy = TRUE. Nach Abschluss des Löschvorgangs wechselt q_xDone zu TRUE. |
|
i_ifDrive |
Eingang für die zu kontrollierende Achse. |
|
|
i_etStorageLocation |
Speicherort, von dem die Motordaten gelesen werden sollen. |
|
Ausgang |
Datentyp |
Beschreibung |
|---|---|---|
|
q_xActive |
BOOL |
TRUE: Der Baustein ist eingeschaltet und muss weiter ausgeführt werden. FALSE: Der Baustein ist abgeschaltet. |
|
q_xReady |
BOOL |
Die POU ist bereit, die Motordaten zu löschen. Falls FALSE zutrifft, stellen Sie sicher, dass die Anforderungen erfüllt werden. |
|
q_xBusy |
BOOL |
TRUE: Die POU führt den gegebenen Anwenderbefehl (Löschen von Motordaten im Antrieb) aus. FALSE: Die POU wartet auf weitere Anwenderbefehle. |
|
q_xDone |
BOOL |
TRUE: Der Anwenderbefehl (Löschen von Motordaten im Antrieb) wurde ausgeführt. Mit FB_MotorDataWrite können neue Motordaten programmiert werden. FALSE: Der Anwenderbefehl ist in Bearbeitung oder es wurde noch keiner gegeben. |
|
q_etDiag |
Allgemeingültige, bibliotheksunabhängige Aussage zur Diagnose. Alle Werte außer GD.ET_Diag.Ok entsprechen einer Diagnosemeldung. |
|
|
q_etDiagExt |
POU-spezifischer, diagnosebezogener Ausgang. q_etDiag = GD.ET_Diag.Ok -> Statusmeldung q_etDiag <> GD.ET_Diag.Ok -> Diagnosemeldung |
|
|
q_sMsg |
STRING[80] |
Ereignisabhängige Meldung, die mehr Informationen zum Diagnosezustand liefert. |
|
q_etDiag |
q_etDiagExt |
Enumerationswert |
Beschreibung |
|---|---|---|---|
|
OK |
6 |
Die POU überprüft, ob die Motordaten im Antrieb hinterlegt sind. |
|
|
OK |
17 |
Die Motordaten in der Achse werden gelöscht. |
|
|
OK |
16 |
Die POU ist deaktiviert. |
|
|
OK |
10 |
Der Befehl wurde erfolgreich ausgeführt. |
|
|
OK |
3 |
Die POU wartet auf Ausführung. |
|
|
OK |
2 |
Die POU wartet auf Sercos Phase 2. |
|
|
DriveConditionInvalid |
9 |
Das Löschen der Motordaten ist für Motoren von Schneider Electric nicht erlaubt. |
|
|
DriveConditionInvalid |
8 |
Es wurden keine Motordaten auf dem Antrieb gefunden. |
|
|
InputParameterInvalid |
4 |
Der Antrieb unterstützt die Funktion nicht. |
|
|
InputParameterInvalid |
41 |
Der ausgewählte Speicherort für das elektronische Motortypenschild ist ungültig. |
|
|
SercosConditionInvalid |
7 |
Die Sercos-Kommunikation ist nicht möglich. |
|
Aufzählungsname: |
CheckingMotorDataInDrive |
|
Aufzählungswert: |
6 |
|
Beschreibung: |
Die POU überprüft, ob die Motordaten im Antrieb hinterlegt sind. |
Der Funktionsbaustein wird ausgeführt. Warten, bis q_xDone den Wert TRUE hat.
|
Aufzählungsname: |
DeleteMotorDataNotAllowed |
|
Enumerationswert: |
9 |
|
Beschreibung: |
Das Löschen der Motordaten ist für Motoren von Schneider Electric nicht erlaubt. |
|
Ursache |
Lösung |
|---|---|
|
Die Motordaten in den gewählten Achsen dürfen nicht gelöscht werden. |
Überprüfen Sie die ausgewählte Achse. |
|
Aufzählungsname: |
DeletingMotorData |
|
Aufzählungswert: |
17 |
|
Beschreibung: |
Die Motordaten in der Achse werden gelöscht. |
Der Funktionsbaustein wird ausgeführt. Warten, bis q_xDone den Wert TRUE hat.
|
Aufzählungsname: |
Disabled |
|
Aufzählungswert: |
16 |
|
Beschreibung: |
Die POU ist deaktiviert. |
|
Ursache |
Lösung |
|---|---|
|
Die POU ist deaktiviert. |
Setzen Sie den Eingang i_xEnable von FALSE auf TRUE, um die POUs zu aktivieren. |
|
Aufzählungsname: |
Done |
|
Aufzählungswert: |
10 |
|
Beschreibung: |
Der Befehl wurde erfolgreich ausgeführt. |
Die Motordaten wurden erfolgreich gelöscht. Es können neue Motordaten in den Antrieb geschrieben werden.
FunctionNotSupportedByThisDevice
|
Aufzählungsname: |
FunctionNotSupportedByThisDevice |
|
Enumerationswert: |
4 |
|
Beschreibung: |
Der Antrieb unterstützt die Funktion nicht. |
|
Ursache |
Lösung |
|---|---|
|
Ungültiger Objekttyp |
Überprüfen Sie das ausgewählte Objekt. |
|
Aufzählungsname: |
InvalidStorageLocation |
|
Enumerationswert: |
41 |
|
Beschreibung: |
Der ausgewählte Speicherort für das elektronische Motortypenschild ist ungültig. |
|
Ursache |
Lösung |
|---|---|
|
Es ist kein Hiperface-Geber an den physischen Maschinengebereingang angeschlossen. |
Schließen Sie einen Hiperface-Geber an den physischen Maschinengebereingang an. |
|
Der Geber hat nicht genügend Speicher oder es ist kein Geber vorhanden. |
Schließen Sie einen Geber mit Hiperface-Schnittstelle mit mindestens 2 KByte physischem Speicher an. |
|
Aufzählungsname: |
NoMotorDataFoundInDrive |
|
Aufzählungswert: |
8 |
|
Beschreibung: |
Es wurden keine Motordaten auf dem Antrieb gefunden. |
|
Ursache |
Lösung |
|---|---|
|
In der ausgewählten Achse sind keine Motordaten gespeichert. |
Überprüfen Sie die ausgewählte Achse. |
SercosCommunicationNotPossible
|
Aufzählungsname: |
SercosCommunicationNotPossible |
|
Enumerationswert: |
7 |
|
Beschreibung: |
Die Sercos-Kommunikation ist nicht möglich. |
|
Ursache |
Lösung |
|---|---|
|
Die Sercos-Kommunikation ist nicht möglich. |
Überprüfen Sie die Sercos-Phase und die Verdrahtung. |
|
Aufzählungsname: |
WaitForExecute |
|
Aufzählungswert: |
3 |
|
Beschreibung: |
Die POU wartet auf Ausführung. |
Die POU ist aktiv und bereit zur Ausführung. q_xReady ist TRUE.
|
Aufzählungsname: |
WaitForSercosPhase2 |
|
Enumerationswert: |
2 |
|
Beschreibung: |
Die POU wartet auf Sercos Phase 2. |
Die POU ist aktiv und wartet auf Sercos Phase 2. q_xReady ist FALSE.