FB_MotorDataRead - Allgemeine Informationen
|
Typ |
Funktionsbaustein |
|
Verfügbar ab |
V1.1.0.0 |
|
Übernommen aus: |
– |
|
Implementiert: |
– |
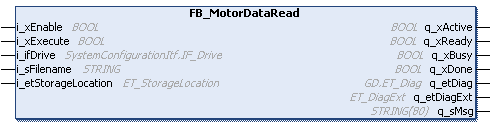
Motordaten auslesen und die Motordaten in eine Binärdatei schreiben
Die Motordaten einer ausgewählten Achse werden gelesen und anschließend in eine Binärdatei geschrieben. Sie können den Dateinamen festlegen. Die Binärdatei kann in eine Datenstruktur vom Typ ST_UserMotorData umgewandelt werden und zwar mit Hilfe der Funktion FC_MotorDataRead.
|
Eingabe |
Datentyp |
Beschreibung |
|---|---|---|
|
i_xEnable |
BOOL |
Eine steigende Flanke FALSE -> TRUE aktiviert die POU, eine fallende Flanke TRUE -> FALSE deaktiviert sie. Wenn die POU abgeschaltet ist, führt sie keine Aktionen aus. |
|
i_xExecute |
BOOL |
FALSE -> TRUE: Die POU liest die Motordaten aus der gewählten Achse und schreibt sie in eine Binärdatei. Während dieses Vorgangs ist q_xBusy = TRUE. Sobald alle Aktionen abgeschlossen wurden, wechselt q_xDone zu TRUE. |
|
i_ifDrive |
Eingang für die zu kontrollierende Achse |
|
|
i_sFilename |
STRING |
Name der Datei, in die die Motordaten geschrieben werden sollen. Die Datei wird vom Funktionsbaustein automatisch angelegt. |
|
i_etStorageLocation |
Speicherort, von dem die Motordaten gelesen werden sollen. |
|
Ausgang |
Datentyp |
Beschreibung |
|---|---|---|
|
q_xActive |
BOOL |
TRUE: Der Baustein ist eingeschaltet und muss weiter ausgeführt werden. FALSE: Der Baustein ist inaktiv. |
|
q_xReady |
BOOL |
TRUE: Die POU ist betriebsbereit und kann Anwenderbefehle entgegennehmen. FALSE: Der Funktionsbaustein ist nicht betriebsbereit und nimmt keine Anwenderbefehle an. |
|
q_xBusy |
BOOL |
TRUE: Die POU führt den gegebenen Anwenderbefehl aus. FALSE: Die POU wartet auf weitere Anwenderbefehle. |
|
q_xDone |
BOOL |
TRUE: Der Anwenderbefehl wurde erfolgreich ausgeführt. FALSE: Der Anwenderbefehl ist in Bearbeitung oder es wurde noch keiner ausgegeben. |
|
q_etDiag |
Allgemeingültige, bibliotheksunabhängige Aussage zur Diagnose. Alle Werte außer GD.ET_Diag.Ok entsprechen einer Diagnosemeldung. |
|
|
q_etDiagExt |
POU-spezifischer, diagnosebezogener Ausgang. q_etDiag = GD.ET_Diag.Ok -> Statusmeldung q_etDiag <> GD.ET_Diag.Ok -> Diagnosemeldung |
|
|
q_sMsg |
STRING[80] |
Ereignisabhängige Meldung, die mehr Informationen zum Diagnosezustand liefert. |
|
q_etDiag |
q_etDiagExt |
Enumerationswert |
Beschreibung |
|---|---|---|---|
|
OK |
16 |
Die POU ist deaktiviert. |
|
|
OK |
10 |
Der Befehl wurde erfolgreich ausgeführt. |
|
|
OK |
44 |
Die Motordaten werden gelesen. |
|
|
OK |
3 |
Die POU wartet auf Ausführung. |
|
|
OK |
2 |
Die POU wartet auf Sercos Phase 2. |
|
|
FileHandlingInvalid |
40 |
Die Datei für die Motordaten konnte nicht erstellt werden. |
|
|
SercosConditionInvalid |
7 |
Die Sercos-Kommunikation ist nicht möglich. |
|
Aufzählungsname: |
CouldNotCreateFile |
|
Enumerationswert: |
40 |
|
Beschreibung: |
Die Datei für die Motordaten konnte nicht erstellt werden. |
|
Ursache |
Lösung |
|---|---|
|
Es ist bereits eine Datei mit dem Dateinamen i_sFilename vorhanden. |
Verwenden Sie einen anderen Dateinamen. |
|
Auf der Flash-Disk der Steuerung ist kein freier Speicherplatz mehr vorhanden. |
Entfernen Sie nicht benutzte Dateien von der Flash-Disk. Verwenden Sie eine Flash-Disk mit mehr Speicherplatz. |
|
Aufzählungsname: |
Disabled |
|
Aufzählungswert: |
16 |
|
Beschreibung: |
Die POU ist deaktiviert. |
|
Ursache |
Lösung |
|---|---|
|
Die POU ist deaktiviert. |
Setzen Sie den Eingang i_xEnable von FALSE auf TRUE, um die POUs zu aktivieren. |
|
Aufzählungsname: |
Done |
|
Aufzählungswert: |
10 |
|
Beschreibung: |
Der Befehl wurde erfolgreich ausgeführt. |
Die Motordaten wurden erfolgreich gelesen. Eine Datei mit dem Dateinamen i_sFilename wurde erstellt.
|
Aufzählungsname: |
ReadingMotorData |
|
Enumerationswert: |
44 |
|
Beschreibung: |
Die Motordaten werden gelesen. |
Der Funktionsbaustein wird ausgeführt. Warten, bis q_xDone den Wert TRUE hat.
SercosCommunicationNotPossible
|
Aufzählungsname: |
SercosCommunicationNotPossible |
|
Enumerationswert: |
7 |
|
Beschreibung: |
Die Sercos-Kommunikation ist nicht möglich. |
|
Ursache |
Lösung |
|---|---|
|
Die Sercos-Kommunikation ist nicht möglich. |
Überprüfen Sie die Sercos-Phase und die Verdrahtung der Sercos-Geräte. |
|
Aufzählungsname: |
WaitForExecute |
|
Aufzählungswert: |
3 |
|
Beschreibung: |
Die POU wartet auf Ausführung. |
Die POU ist aktiv und bereit zur Ausführung. q_xReady ist TRUE.
|
Aufzählungsname: |
WaitForSercosPhase2 |
|
Enumerationswert: |
2 |
|
Beschreibung: |
Die POU wartet auf Sercos Phase 2. |
Die POU ist aktiv und wartet auf Sercos Phase 2. q_xReady ist FALSE.