FB_MotorSerialNumberWrite - Allgemeine Informationen
|
Typ |
Funktionsbaustein |
|
Verfügbar ab |
V1.1.1.5 |
|
Übernommen aus: |
– |
|
Implementiert: |
– |
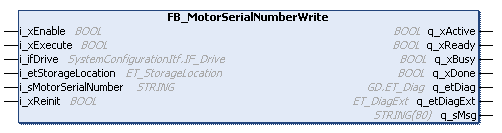
Die Seriennummer eines Motors schreiben
Dieser Funktionsbaustein schreibt die Motorseriennummer in das elektronische Motortypenschild.
|
Eingabe |
Datentyp |
Beschreibung |
|---|---|---|
|
i_xEnable |
BOOL |
Eine steigende Flanke FALSE -> TRUE aktiviert die POU, eine fallende Flanke TRUE -> FALSE deaktiviert sie. Wenn die POU abgeschaltet ist, führt sie keine Aktionen aus. |
|
i_xExecute |
BOOL |
FALSE -> TRUE: Der Baustein schreibt die Motorseriennummer in die ausgewählte Achse. Während des Schreibvorgangs ist q_xBusy = TRUE. Sobald der Schreibvorgang abgeschlossen wurde, wechselt q_xDone zu TRUE. |
|
i_ifDrive |
Eingang für die zu kontrollierende Achse |
|
|
i_etStorageLocation |
Speicherort, an den die Seriennummer geschrieben werden soll (Standardwert: Drive) |
|
|
i_sMotorSerialNumber |
STRING |
Seriennummer des Motors, maximal 20 Zeichen |
|
i_xReinit |
BOOL |
TRUE: Nach dem Schreiben der Motorseriennummer wird der Antrieb neu initialisiert und das Motortypenschild neu gelesen. FALSE: Antrieb wird nicht neu initialisiert, Motortypenschild wird nicht neu gelesen. |
|
Ausgang |
Datentyp |
Beschreibung |
|---|---|---|
|
q_xActive |
BOOL |
TRUE: Der Baustein ist eingeschaltet und muss weiter ausgeführt werden. FALSE: Der Baustein ist abgeschaltet. |
|
q_xReady |
BOOL |
TRUE: Die POU ist betriebsbereit und kann Anwenderbefehle entgegennehmen. FALSE: Der Funktionsbaustein ist nicht betriebsbereit und nimmt keine Anwenderbefehle an. |
|
q_xBusy |
BOOL |
TRUE: Die POU führt den gegebenen Anwenderbefehl aus. FALSE: Die POU wartet auf weitere Anwenderbefehle. |
|
q_xDone |
BOOL |
TRUE: Der Anwenderbefehl wurde ausgeführt. FALSE: Der Anwenderbefehl ist in Bearbeitung oder es wurde noch keiner gegeben. |
|
q_etDiag |
Allgemeingültige, bibliotheksunabhängige Aussage zur Diagnose. Alle Werte außer GD.ET_Diag.Ok entsprechen einer Diagnosemeldung. |
|
|
q_etDiagExt |
POU-spezifischer, diagnosebezogener Ausgang. q_etDiag = GD.ET_Diag.Ok -> Statusmeldung q_etDiag <> GD.ET_Diag.Ok -> Diagnosemeldung |
|
|
q_sMsg |
STRING[80] |
Ereignisabhängige Meldung, die mehr Informationen zum Diagnosezustand liefert. |
|
q_etDiag |
q_etDiagExt |
Enumerationswert |
Beschreibung |
|---|---|---|---|
|
OK |
16 |
Die POU ist deaktiviert. |
|
|
OK |
10 |
Der Befehl wurde erfolgreich ausgeführt. |
|
|
OK |
46 |
Die POU wird ausgeführt. |
|
|
OK |
3 |
Die POU wartet auf Ausführung. |
|
|
OK |
2 |
Die POU wartet auf Sercos Phase 2. |
|
|
DriveConditionInvalid |
45 |
Diese Operation ist für die ausgewählte Achse nicht zulässig. |
|
|
InputParameterInvalid |
4 |
Der Antrieb unterstützt die Funktion nicht. |
|
|
InputParameterInvalid |
18 |
Die eingegebenen Strings sind zu lang. |
|
|
SercosConditionInvalid |
7 |
Die Sercos-Kommunikation ist nicht möglich. |
|
Aufzählungsname: |
Disabled |
|
Aufzählungswert: |
16 |
|
Beschreibung: |
Die POU ist deaktiviert. |
|
Ursache |
Lösung |
|---|---|
|
Die POU ist deaktiviert. |
Setzen Sie den Eingang i_xEnable von FALSE auf TRUE, um die POUs zu aktivieren. |
|
Aufzählungsname: |
Done |
|
Aufzählungswert: |
10 |
|
Beschreibung: |
Der Befehl wurde erfolgreich ausgeführt. |
Die Motorseriennummer wurde erfolgreich geschrieben.
|
Aufzählungsname: |
Executing |
|
Enumerationswert: |
46 |
|
Beschreibung: |
Die POU wird ausgeführt. |
Die POU wird ausgeführt.
FunctionNotSupportedByThisDevice
|
Aufzählungsname: |
FunctionNotSupportedByThisDevice |
|
Enumerationswert: |
4 |
|
Beschreibung: |
Der Antrieb unterstützt die Funktion nicht. |
|
Ursache |
Lösung |
|---|---|
|
Ungültiger Objekttyp |
Überprüfen Sie das ausgewählte Objekt. |
|
Aufzählungsname: |
InputStringTooLarge |
|
Aufzählungswert: |
18 |
|
Beschreibung: |
Die eingegebenen Strings sind zu lang. |
|
Ursache |
Lösung |
|---|---|
|
Die angegebene Motorseriennummer ist länger als 20 Zeichen. |
Geben Sie eine Motorseriennummer mit weniger als 20 Zeichen an. |
|
Aufzählungsname: |
OperationNotAllowed |
|
Enumerationswert: |
45 |
|
Beschreibung: |
Diese Operation ist für die ausgewählte Achse nicht zulässig. |
|
Ursache |
Lösung |
|---|---|
|
Die Operation ist für die gewählte Achse nicht zulässig, z. B. weil ein Schneider Electric Servomotor vor verwendet wird. |
Wählen Sie die Achse aus, für die diese Operation zulässig ist. |
SercosCommunicationNotPossible
|
Aufzählungsname: |
SercosCommunicationNotPossible |
|
Enumerationswert: |
7 |
|
Beschreibung: |
Die Sercos-Kommunikation ist nicht möglich. |
|
Ursache |
Lösung |
|---|---|
|
Die Sercos-Kommunikation ist nicht möglich. |
Überprüfen Sie die Sercos-Phase und die Verdrahtung. |
|
Aufzählungsname: |
WaitForExecute |
|
Aufzählungswert: |
3 |
|
Beschreibung: |
Die POU wartet auf Ausführung. |
Die POU ist aktiv und bereit zur Ausführung. q_xReady ist TRUE.
|
Aufzählungsname: |
WaitForSercosPhase2 |
|
Enumerationswert: |
2 |
|
Beschreibung: |
Die POU wartet auf Sercos Phase 2. |
Die POU ist aktiv und wartet auf Sercos Phase 2. q_xReady ist FALSE.