SDIneg und SDIpos - Sichere Drehrichtung negativ/positiv (Safe Direction Negative/Positive)
Allgemeine Funktionsbeschreibung
Die Sicherheitsfunktion Sichere Drehrichtung stellt sicher, dass eine Rotation/Bewegung nur in der erlaubten (parametrierten) Richtung möglich ist.
Der Funktionsbaustein unterscheidet zwischen zwei Rotations-/Bewegungsrichtungen, indem er separate Eingänge für die Anforderung der negativen oder positiven SDI-Überwachungsfunktion bereitstellt: SDIneg und SDIpos. Beide SDI-Überwachungsfunktionen werden mit denselben Parametern konfiguriert, lassen sich aber unabhängig voneinander anfordern.
HINWEIS:
In welcher physikalischen Rotations-/Bewegungsrichtung SDIpos oder SDIneg tatsächlich resultiert, hängt von Ihrer Anwendung ab.
HINWEIS:
Falls SDIpos und SDIneg gleichzeitig angefordert werden, wird automatisch die SS1-Funktion als die definierte Fallback-Funktion ausgeführt.
Die SDIneg/SDIpos-Funktion verhindert, dass der Motor um mehr als den definierten Betrag in die falsche Richtung abweicht (Geräteparameter SDI_PositionTolerance[sTol], siehe unten).
Überwachung durch den sicherheitsbezogenen FB bzw. das Safety-Modul
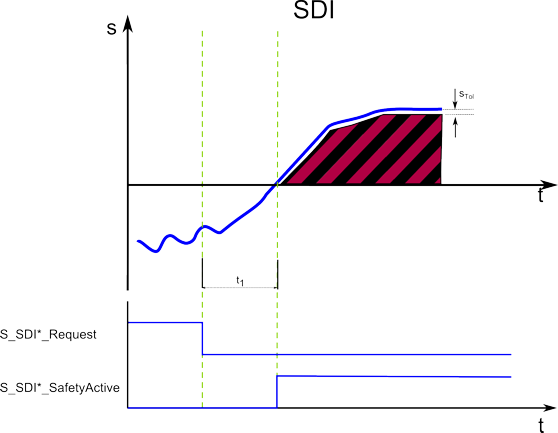
Die Anforderung der Sicherheitsfunktion erfolgt zu Beginn des Zeitintervalls t1 (Signal 'S_SDI*_Request' im Diagramm). t1 wird über den Geräteparameter SDI_StartDelayTime[t1] eingestellt.
Innerhalb des Zeitintervalls t1 empfängt die Standard-Steuerung ebenfalls die Anforderung aus dem angeschlossenen Prozess und startet die Motion Control-Funktion gemäß der in der Standard-Anwendung definierten Logik und Antriebsparametrierung.
Nach Ablauf von t1 wird die Richtung durch das Erfassen der Position überwacht. Die Bewegung/Rotation in Gegenrichtung zur erlaubten Richtung ist zulässig, wenn die definierte Positionstoleranz STol nicht überschritten wird.
Wenn die SDI-Funktion erfolgreich ausgeführt wird, steuert der Funktionsbaustein S_SDI*_SafetyActive auf SAFETRUE (siehe Diagramm).
Wenn die SS1-Fallback-Funktion aufgrund eines erkannten Fehlers der Positionstoleranz wie oben beschrieben aktiviert wurde, wird dies durch S_SS1_SafetyActive = SAFETRUE angezeigt.
Fallback-Funktion
Falls die erfasste Position um mehr als die eingestellte Positionstoleranz (Parameter SDI_PositionTolerance[sTol]) in die falsche Richtung abweicht, wird automatisch die SS1-Funktion als Fallback ausgeführt.
Anwendung
Die SDI-Funktion wird verwendet, um sicherzustellen, dass eine Rotation oder Bewegung in eine unerlaubte Richtung nicht möglich ist, z.B. wenn Personen den Betriebsbereich einer Maschine betreten.
Relevante Geräteparameter des Safety-Moduls
So bearbeiten Sie die relevanten sicherheitsbezogenen Geräteparameter: Im EcoStruxure Machine Expert - Safety-'Geräte'-Fenster, ...
Klicken Sie mit der linken Maustaste auf das Safety-Modul im Gerätebaum.
Blättern Sie im Geräteparametrierungseditor auf der rechten Seite bis zum relevanten Parameterbereich (siehe Tabellenüberschrift unten).
Definieren Sie die in der nachfolgenden Tabelle beschriebenen Parameter für diese Sicherheitsfunktion.
HINWEIS:
Die hier eingegebenen Parameter sind hauptsächlich Überwachungsparameter. Sie definieren das Überwachungsverhalten und bestimmen damit, ob eine Sicherheitsfunktion wie definiert ausgeführt wird oder ob aufgrund eines erkannten Fehlers eine Fallback-Funktion ausgeführt werden muss. Die eigentliche Antriebsparametrierung (z.B. Abbremsparameter, etc.) müssen Sie in EcoStruxure Machine Expert definieren. Siehe Thema "Funktionsbeschreibung".
Die in der nachfolgenden Tabelle aufgelisteten Parameter werden verwendet, um sowohl die SDIneg-, als auch die SDIpos-Funktion zu konfigurieren. Obwohl sie identisch parametriert werden, können die Funktionen unabhängig voneinander angefordert werden.
Detailinformationen zu den Wertebereichen und Standardwerten dieser Parameter finden Sie im entsprechenden Kapitel zum verwendeten Sicherheitsmodul im Handbuch "Parameter und Prozessdaten der Sicherheitsmodule".
|
Parameterbereich: Safe_Direction |
|
|
SDI_StartDelayTime[t1] |
Verzögerungszeit, nach der die Überwachung der Sicherheitsfunktion gestartet wird. Dieser Wert muss der Zeitdauer entsprechen, die das gesamte Motion Control-System benötigt, um zu reagieren. Dies entspricht der Zeit, nach der die Standard-Steuerung die angeforderte Sicherheitsfunktion initiieren kann, nachdem sie die im Prozessdaten-Steuerwort kodierte Anforderung über den SERCOS-Bus empfangen hat. Dieses Intervall wird im oben gezeigten Zeitdiagramm als t1 bezeichnet. Der hier eingestellte Wert muss gleich oder größer als die Reaktionszeit des gesamten Systems sein, inklusive der Reaktionszeit des Standard-Systems. Der Wert darf nicht kleiner als die kürzest mögliche Reaktionszeit der beteiligten Komponenten sein, d.h. der frühest mögliche Zeitpunkt, zu dem der Antrieb abbremsen kann. |
|
SDI_PositionTolerance[sTol] |
Erlaubte Abweichung von der überwachten Position, um die Richtung zu bestimmen (STol in der oberen Abbildung). Falls die Abweichung den definierten Wert nach Ablauf von t1 überschreitet, wird die SS1-Funktion als Fallback aktiviert. |
WARNUNG
NICHTERFÜLLEN DER SICHERHEITSANFORDERUNGEN
Stellen Sie sicher, dass die ausgeführte Rotations-/Bewegungsrichtung der Maschine (negativ/positiv) und die gewählte Sicherheitsfunktion (SDIneg/SDIpos) in Ihrer Anwendung zusammenpassen.
Stellen Sie sicher, dass Ihre Risikoanalyse eine Auswertung für den Fall falsch eingestellter Rotationen/Bewegungen enthält.
Verwenden Sie geeignete Sicherheitsverriegelungen, wenn eine Gefahr für Personen und/oder Ausrüstung besteht.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Körperverletzungen oder Sachschäden zur Folge haben.
WARNUNG
NICHTERFÜLLEN DER SICHERHEITSANFORDERUNGEN
Stellen Sie sicher, dass die Geräteparameter für das Sicherheitsmodul Ihrer Risikoanalyse entsprechen.
Stellen Sie sicher, dass Ihre Risikoanalyse eine Auswertung für den Fall falsch eingestellter Geräteparameter enthält.
Validieren Sie die gesamte Sicherheitsfunktion in Bezug auf die eingestellten Geräteparameterwerte und prüfen Sie die Applikation sorgfältig.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Körperverletzungen oder Sachschäden zur Folge haben.
Relevante Ein-/Ausgänge des Funktionsbausteins und Bits im Statuswort
Anforderung der Überwachungsfunktion über die Bausteineingänge S_SDIpos_Request = SAFEFALSE oder S_SDIneg_Request = SAFEFALSE
Anzeige des Funktionsstatus an Bausteinausgängen S_SDIpos_SafetyActive und S_SDIneg_SafetyActive (SAFETRUE = Sicherheitsfunktion aktiviert)
Im DWORD, ausgegeben an AxisStatus
Bit 13: Status SDIpos (TRUE = Sicherheitsfunktion aktiviert)
Bit 14: Status SDIneg (TRUE = Sicherheitsfunktion aktiviert)