Weiteres Signalablauf-Diagramm
HINWEIS:
Die Signalablauf-Diagramme in dieser Dokumentation vernachlässigen möglicherweise bestimmte Diagnose-Codes. So kann beispielsweise ein Diagnose-Code im Diagramm fehlen, wenn der betreffende Status des Funktionsbausteins ein temporärer Übergangszustand ist und nur für einen Zyklus der Sicherheitssteuerung aktiv ist.
Es werden nur typische Signalkombinationen der Eingangssignale dargestellt. Weitere Signalkombinationen sind möglich.
HINWEIS:
Das Signalablauf-Diagramm ist vereinfacht dargestellt und erklärt die Funktionalität des sicherheitsbezogenen Funktionsbausteins SF_SafeMotionControl. Das Beispiel, wie es hier gezeigt und beschrieben ist, ist nicht als praktische Sicherheitslösung gedacht.
Beachten Sie, dass temporäre Zwischenzustände nicht in den Signalablauf-Diagrammen dargestellt sind. In diesen Diagrammen werden nur typische Signalkombinationen der Eingangssignale dargestellt. Weitere Signalkombinationen sind möglich.
Die signifikantesten Bereiche innerhalb der Signalablauf-Diagramme sind farblich unterlegt.
Weitere Informationen
Beachten Sie auch das Diagramm in der Übersicht zu diesem Funktionsbaustein.
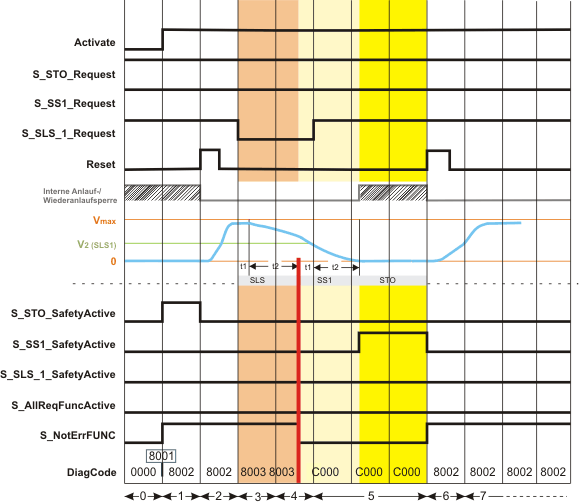
In der folgenden Beispielsequenz kann die Anforderung der Sicherheitsfunktion SLS1 durch ein sicherheitsbezogenes Befehlsgerät (z.B. Schlüsselschalter für die Anforderung zum Öffnen der Schutztür) nicht erfolgreich aktiviert werden. Deshalb wird erst SS1 und dann STO aktiviert, die als Fallback-Funktionen der Sicherheitsfunktion SLS1 definiert sind.
Die Rampenüberwachung ist durch die Einstellung des entsprechenden Geräteparameters *_RampMonitoring = Deaktiviert sowohl für die sicherheitsbezogene SLS1-Überwachungsfunktion, als auch für SS1 ausgeschaltet.
|
0 |
Der Funktionsbaustein ist noch nicht aktiviert (Activate = FALSE). Folglich sind die Ausgänge FALSE/SAFEFALSE. |
|
1 |
Das Safety-Modul geht nach dem Start automatisch in den funktional sicheren Zustand STO. Nach der Bausteinaktivierung (durch Steuern des Eingangs Activate auf TRUE), zeigt der Funktionsbaustein diesen Zustand durch S_STO_SafetyActive = SAFETRUE an. Als Folge des Zustands STO ist die interne Anlaufsperre aktiv. (Gemäß der zutreffenden Norm IEC 60204-1, führt die STO-Funktion Stopp-Kategorie 0 aus. Diese Stopp-Kategorie bedingt eine nachfolgende Anlaufsperre.) Mit der Bausteinaktivierung steuert Ausgang S_NotErrFUNC sofort auf SAFETRUE und zeigt damit an, dass der Funktionsbaustein keinen Fehler erkannt hat. |
|
2 |
Mit der Flanke FALSE > TRUE an Eingang Reset des sicherheitsbezogenen Funktionsbausteins, ist die Anlaufsperre aufgehoben. Durch dieses Rücksetzen wird der Zustand STO verlassen. Da nun keine Sicherheitsfunktion angefordert ist, steuert Ausgang S_STO_SafetyActive zurück auf SAFEFALSE, während die anderen Bausteinausgänge in ihrem vorherigen Zustand bleiben. Unter dieser Bedingung kann die nicht-sicherheitsbezogene Standard-Steuerung den Betrieb des Antriebs durch Beschleunigen der Achse auf die parametrierte Zielgeschwindigkeit starten. |
|
3 |
Die Sicherheitsfunktion SLS1 ist angefordert: Das Signal an Eingang S_SLS_1_Request steuert auf SAFEFALSE, z.B. durch Entriegeln eines Schlüsselschalters. Innerhalb des Zeitintervalls t1 empfängt die Standard-Steuerung ebenfalls die Anforderung aus dem angeschlossenen Prozess und startet die Motion Control-Funktion gemäß der in der Standard-Anwendung definierten Logik und Antriebsparametrierung. t1 muss in den Geräteparametern des Safety-Moduls definiert werden (SLS*_StartDelayTime[t1]). Nachdem t1 abgelaufen ist, wird die Abbremsung des Antriebs auf die Zielgeschwindigkeit V2 durch die Standard-Steuerung entsprechend der in der Standard-Anwendung definierten Antriebsparametrierung ausgeführt. Während der Abbremsphase t2 (Rampenphase) ist in unserem Beispiel die SLS1-Rampenüberwachung deaktiviert. Das bedeutet, dass während t2 die Überwachung inaktiv ist, aber die Zielgeschwindigkeit mit Ablauf von t2 verifiziert wird. |
|
4 |
Die parametrierte begrenzte Zielgeschwindigkeit V2 wird vor Ablauf der Überwachungszeit t2 nicht erreicht. Als Folge der erkannten Geschwindigkeitsüberschreitung
|
|
5 |
Nach Ablauf von t1 (der SS1-Funktion) wird die Abbremsung des Antriebs durch die Standard-Steuerung ausgeführt, um die Achse zu stoppen. Während der Abbremsphase t2 (Rampenphase) ist in unserem Beispiel die SS1-Rampenüberwachung deaktiviert. Das bedeutet, dass während t2 die Überwachung von SS1 inaktiv ist, aber die Geschwindigkeit am Ende von SS1 t2 Null sein muss. Zum Zeitpunkt t2 ist die Geschwindigkeit = 0 und STO ist aktiviert. Der Antrieb ist nun drehmomentfrei und der Stillstand wird überwacht. Ausgang S_SS1_SafetyActive steuert auf SAFETRUE, um die aktive SS1-Funktion anzuzeigen. Inzwischen ist die Maschine durch die Behebung der Ursache für den aufgetretenen Fehler bereit für einen Neustart. Die Anforderung der SLS1-Sicherheitsfunktion wird ebenfalls aufgehoben, indem Eingang S_SLS_1_Request zurück auf SAFETRUE steuert (z.B. durch Verriegeln des Schlüsselschalters). Der Antrieb bleibt jedoch aufgrund der implementierten Wiederanlaufsperre drehmomentfrei. |
|
6 |
Mit der Flanke FALSE > TRUE an Eingang Reset des sicherheitsbezogenen Funktionsbausteins ist die Wiederanlaufsperre aufgehoben. Ausgang S_SS1_SafetyActive steuert zurück auf SAFEFALSE und S_NotErrFUNC = SAFETRUE signalisiert, dass kein Fehler vorhanden ist. Da keine Sicherheitsfunktion angefordert ist, kann die Standard-Steuerung die Achse beschleunigen, bis sie ihre, in der Standard-Motion-Anwendung parametrierte Geschwindigkeit, ohne Überschreitung der definierten und permanent überwachten sicheren maximalen Geschwindigkeit (Vmax) erreicht. |