SLS1 bis SLS4 - vier Funktionen Sicher begrenzte Geschwindigkeit (Safely Limited Speed)
Allgemeine Funktionsbeschreibung
Die Funktion Sichere begrenzte Geschwindigkeit bewirkt die gesteuerte Abbremsung eines Motors auf eine definierte Zielgeschwindigkeit. Der Antrieb wird abgebremst, bis eine definierte, begrenzte Zielgeschwindigkeit erreicht wird, die dann überwacht ist. SLS verhindert dadurch, dass der Motor die definierte begrenzte Geschwindigkeit überschreitet.
Der Funktionsbaustein bietet vier separate SLS-Überwachungsfunktionen: SLS1 bis SLS4. Sie funktionieren identisch, können jedoch unabhängig voneinander parametriert und angefordert werden. Dadurch lassen sich vier verschiedene Geschwindigkeiten überwachen.
HINWEIS:
Falls mehrere SLS-Funktionen gleichzeitig angefordert werden, hat SLS1 die höchste und SLS4 die niedrigste Priorität.
Wenn mehrere SLS-Funktionen angefordert werden, müssen Sie die langsamste Zielgeschwindigkeit v2 für die SLS mit der höchsten Priorität parametrieren:
v2(SLS1) <= v2(SLS2) <= v2(SLS3) <= v2(SLS4)
Ausnahme: ein v2-Wert = 0 wird ignoriert und führt nicht zu einem Fehler.
Andere Konfigurationen werden als Konfigurationsfehler angesehen und das Modul erreicht nicht den Betriebszustand.
Beispiel: Die folgende Konfiguration ist gültig:
v2(SLS1) = 600, v2(SLS2) = 600, v2(SLS3) = 800 v2(SLS4) = 0
Überwachung durch den sicherheitsbezogenen FB bzw. das Safety-Modul
Das Überwachungsverhalten des Funktionsbausteins hängt von der Parametrierung des Safety-Moduls ab:
Falls die Rampenüberwachung deaktiviert ist, ist die Überwachung passiv, bis das Zeitintervall t2 abgelaufen ist (siehe Abbildung und Beschreibung unten).
Falls die Rampenüberwachung aktiviert ist, überwacht das Safety-Modul die durch die Abbremsrampe spezifizierte Abbremsung des Motors.
Nach dem Abbremsen des Motors (gesteuert durch die Standard-Steuerung) überwacht die Funktion dann die definierte Zielgeschwindigkeit (SLS*_Speed[v2]) und verhindert damit eine zu hohe Drehzahl.
Die Anforderung der Sicherheitsfunktion erfolgt zu Beginn des Zeitintervalls t1 (Signal 'S_SLS*_Request' im Diagramm). t1 wird über den Geräteparameter SLS*_StartDelayTime[t1] eingestellt.
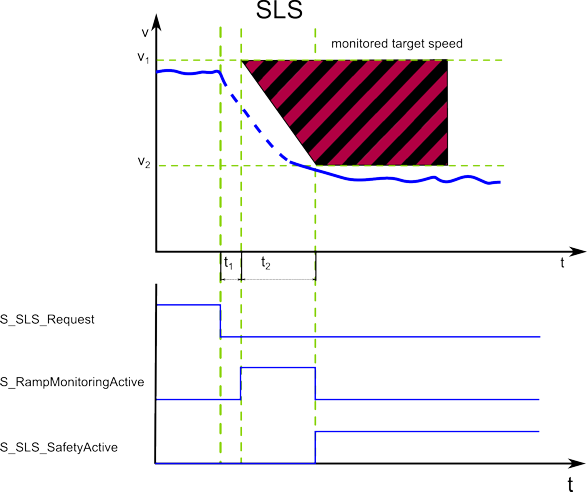
Innerhalb des Zeitintervalls t1 empfängt die Standard-Steuerung ebenfalls die Anforderung aus dem angeschlossenen Prozess und startet die Motion Control-Funktion gemäß der in der Standard-Anwendung definierten Logik und Antriebsparametrierung.
Nach Ablauf von t1 wird der Antrieb abgebremst. Die maximal erlaubte Dauer t2 dieser Rampenphase ist durch den Geräteparameter SLS*_RampMonitoringTime[t2] definiert.
Am Ende von t2 muss die definierte begrenzte Zielgeschwindigkeit SLS*_Speed[v2] erreicht sein. Geschwindigkeit v2 wird dann überwacht, solange SLS aktiv bleibt.
Während t2 kann die Abbremsung durch Einstellen des Geräteparameters SLS*_RampMonitoring = Aktiviert überwacht werden.
Falls die Rampenüberwachung deaktiviert ist, wird die Abbremskurve nicht überwacht. Während des Zeitintervalls t2 ist sogar eine Beschleunigung erlaubt. Die Zielgeschwindigkeit muss vor Ablauf von t2 erreicht worden sein.
Falls die Rampenüberwachung aktiviert ist, wird die Abbremskurve überwacht und muss der parametrierten Rampe folgen (wie in der Abbildung gezeigt).
Wenn die Zielgeschwindigkeit der SLS erfolgreich erreicht ist, steuert der Funktionsbaustein S_SLS*_SafetyActive auf SAFETRUE (siehe Diagramm).
Andernfalls, wenn die Fallback-Funktion SS1 aufgrund eines erkannten Fehlers wie oben beschrieben aktiviert wurde, wird dies durch S_SS1_SafetyActive = SAFETRUE angezeigt.
Fallback-Funktion
Welche Funktion als Fallback ausgeführt wird, hängt davon ab, ob die Rampenüberwachung aktiviert ist.
Falls die Rampenüberwachung deaktiviert ist, wird die Abbremskurve nicht überwacht. Während des Zeitintervalls t2 ist sogar eine Beschleunigung erlaubt. Die Zielgeschwindigkeit muss vor Ablauf von t2 erreicht worden sein. Andernfalls wird SS1 als die definierte Fallback-Funktion aktiviert.
Falls die Rampenüberwachung aktiviert ist, wird die Abbremskurve überwacht und muss der parametrierten Rampe folgen (wie in der Abbildung gezeigt). Andernfalls wird STO als die definierte Fallback-Funktion aktiviert.
Anwendung
Die SLS-Funktion wird verwendet, wenn Personen Zugang zum Betriebsbereich haben. Mit Hilfe der SLS-Funktion wird die Geschwindigkeit zuerst reduziert und anschließend die sicherheitsbezogene Drehzahlüberwachung aktiviert, um ein unbeabsichtigtes Überschreiten des parametrierten Geschwindigkeitslimits zu verhindern.
Durch die Bereitstellung von vier separaten SLS-Funktionen ließe sich die Sicherheitsfunktion z.B. durch Definieren mehrerer Annäherungsbereiche erweitern: Je näher eine Person dem Betriebsbereich kommt, desto mehr wird die Geschwindigkeit reduziert.
HINWEIS:
Informationen über die Encoder-Auflösung des eingesetzten Motors entnehmen Sie der Dokumentation des SH3/MH3-Motors, welche Teil der Online-Hilfe zu EcoStruxure Machine Expert ist (Lexium SH3 Motor - Produkthandbuch oder Lexium MH3 Motor - Produkthandbuch).
Bestimmen Sie die Auflösung wie folgt:
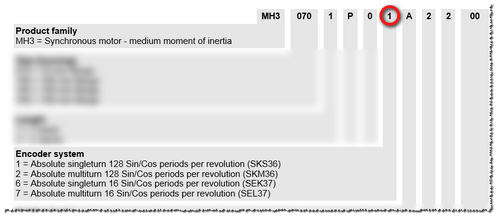
Ziffer 10 des Typcodes des Motors weist das eingebaute Encoder-System aus.
Im Abschnitt "Typcode" in Kapitel 1 der Dokumentation des Motors finden Sie die Anzahl der Sin/Cos-Perioden pro Umdrehung.
Auszug aus einer Motor-Dokumentation
Relevante Geräteparameter des Safety-Moduls
So bearbeiten Sie die relevanten sicherheitsbezogenen Geräteparameter: Im EcoStruxure Machine Expert - Safety-'Geräte'-Fenster, ...
Klicken Sie mit der linken Maustaste auf das Safety-Modul im Gerätebaum.
Blättern Sie im Geräteparametrierungseditor auf der rechten Seite bis zum relevanten Parameterbereich (siehe Tabellenüberschrift unten).
Definieren Sie die in der nachfolgenden Tabelle beschriebenen Parameter für diese Sicherheitsfunktion.
Das Safety-Modul bietet vier separate SLS-Funktionen: SLS1 bis SLS4. Sie lassen sich mit separaten Parametern konfigurieren, d.h. jeder Parameter ist für jede SLS-Funktion verfügbar. In der folgenden Tabelle steht * als Platzhalter für SLS1 bis SLS4.
HINWEIS:
Die hier eingegebenen Parameter sind hauptsächlich Überwachungsparameter. Sie definieren das Überwachungsverhalten und bestimmen damit, ob eine Sicherheitsfunktion wie definiert ausgeführt wird oder ob aufgrund eines erkannten Fehlers eine Fallback-Funktion ausgeführt werden muss. Die eigentliche Antriebsparametrierung (z.B. Abbremsparameter, etc.) müssen Sie in EcoStruxure Machine Expert definieren. Siehe Thema "Funktionsbeschreibung".
Detailinformationen zu den Wertebereichen und Standardwerten dieser Parameter finden Sie im entsprechenden Kapitel zum verwendeten Sicherheitsmodul im Handbuch "Parameter und Prozessdaten der Sicherheitsmodule".
|
Parameterbereich: Safe_Limited_Speed |
|
|
SLS*_StartDelayTime[t1] |
Verzögerungszeit, nach der die Überwachung der Sicherheitsfunktion gestartet wird. Dieser Wert muss der Zeitdauer entsprechen, die das gesamte Motion Control-System benötigt, um zu reagieren. Dies entspricht der Zeit, nach der die Standard-Steuerung die angeforderte Sicherheitsfunktion initiieren kann, nachdem sie die im Prozessdaten-Steuerwort kodierte Anforderung über den SERCOS-Bus empfangen hat. Dieses Intervall wird im oben gezeigten Zeitdiagramm als t1 bezeichnet. Der hier eingestellte Wert muss gleich oder größer als die Reaktionszeit des gesamten Systems sein, inklusive der Reaktionszeit des Standard-Systems. Der Wert darf nicht kleiner als die kürzest mögliche Reaktionszeit der beteiligten Komponenten sein, d.h. der frühest mögliche Zeitpunkt, zu dem der Antrieb abbremsen kann. |
|
SLS*_RampMonitoring |
|
|
SLS*_MaxRampVelocity[v1] |
Der Parameter ist nur relevant, wenn die Rampenüberwachung aktiviert ist (siehe vorherige Tabellenzeile). Der Wert beeinflusst die Steigung der Abbremsrampe (siehe Parameter SLS*_RampMonitoring). |
|
SLS*_RampMonitoringTime[t2] |
Der Parameter definiert die Dauer in Millisekunden, nach der die Zielgeschwindigkeit (Parameter SLS*_Speed[v2]) erreicht werden muss (t2 in der Abbildung). Falls die Rampenüberwachung aktiviert ist, beeinflusst der Wert die Steigung der Abbremsrampe (siehe Parameter SLS*_RampMonitoring). |
|
SLS*_Speed[v2] |
Definiert die finale Zielgeschwindigkeit, die spätestens nach der Zeit t2 erreicht werden muss und dann überwacht wird, solange SLS aktiv bleibt. Der Wert Einheit hängt von der Auflösung des Drehgebers ab. Falls die Rampenüberwachung aktiviert ist, beeinflusst der Wert die Steigung der Abbremsrampe (siehe Parameter SLS*_RampMonitoring). |
HINWEIS:
Wenn die SLS-Funktion verwendet wird, muss auch die SS1-Funktion parametriert werden.
WARNUNG
NICHTERFÜLLEN DER SICHERHEITSANFORDERUNGEN
Stellen Sie sicher, dass die Geräteparameter für das Sicherheitsmodul Ihrer Risikoanalyse entsprechen.
Stellen Sie sicher, dass Ihre Risikoanalyse eine Auswertung für den Fall falsch eingestellter Geräteparameter enthält.
Validieren Sie die gesamte Sicherheitsfunktion in Bezug auf die eingestellten Geräteparameterwerte und prüfen Sie die Applikation sorgfältig.
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Körperverletzungen oder Sachschäden zur Folge haben.
Relevante Ein-/Ausgänge des Funktionsbausteins und Bits im Statuswort
Anforderung der Überwachungsfunktion über die Bausteineingänge S_SLS_1_Request = SAFEFALSE bis S_SLS_4_Request = SAFEFALSE.
Anzeige des Funktionsstatus an den Bausteinausgängen S_SLS_1_SafetyActive bis S_SLS_4_SafetyActive (SAFETRUE = Sicherheitsfunktion aktiviert)
Im DWORD, ausgegeben an AxisStatus
Bit 9: Status SLS1 (TRUE = Sicherheitsfunktion aktiviert)
Bit 10: Status SLS2 (TRUE = Sicherheitsfunktion aktiviert)
Bit 11: Status SLS3 (TRUE = Sicherheitsfunktion aktiviert)
Bit 12: Status SLS4 (TRUE = Sicherheitsfunktion aktiviert)