SMS - Sichere maximale Geschwindigkeit (Safe Maximum Speed)
Allgemeine Funktionsbeschreibung
Das Safety-Modul überwacht permanent die parametrierte sichere maximale Geschwindigkeit (SMS) (Einstellung über Geräteparameter SMS_MaxSpeed des Safety-Moduls), unabhängig von den angeforderten Sicherheitsfunktionen.
Überwachung durch den sicherheitsbezogenen FB bzw. das Safety-Modul
Da die SMS-Überwachungsfunktion permanent aktiv ist, ist kein Bausteineingang verfügbar/erforderlich, um sie anzufordern. Es gibt jedoch einen Bausteinausgang, um deren Aktivität anzuzeigen.
Für die Sicherheitsfunktion SMS müssen keine Verzögerungs- oder Überwachungszeiten parametriert werden.
Im Gegensatz zu anderen Sicherheitsfunktionen wird die sichere maximale Geschwindigkeit (Vmax in der Abbildung) kontinuierlich überwacht.
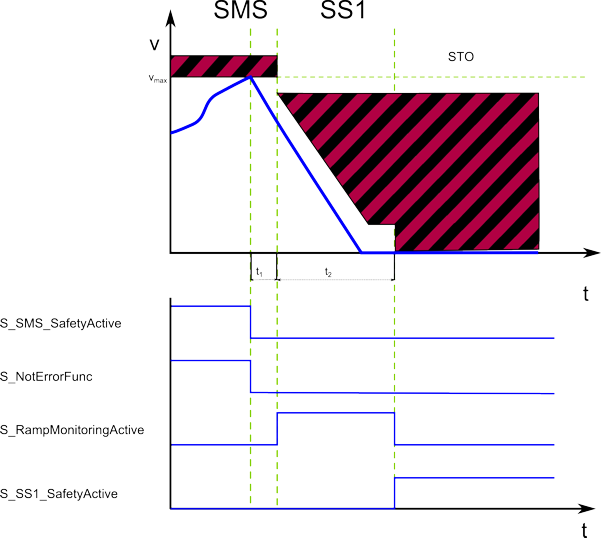
STO und SMS haben die höchste Priorität bei den verfügbaren Sicherheitsfunktionen.
Fallback-Funktion
Wenn die definierte sichere maximale Geschwindigkeit überschritten wird, wird zunächst automatisch die SS1-Funktion und anschließend die STO-Funktion als Fallback ausgeführt.
Eine aktive Fallback-Funktion wird durch Steuern des entsprechenden Bausteinausgangs S_SS1_SafetyActive oder S_STO_SafetyActive auf SAFETRUE angezeigt.
HINWEIS:
Informationen über die Encoder-Auflösung des eingesetzten Motors entnehmen Sie der Dokumentation des SH3/MH3-Motors, welche Teil der Online-Hilfe zu EcoStruxure Machine Expert ist (Lexium SH3 Motor - Produkthandbuch oder Lexium MH3 Motor - Produkthandbuch).
Bestimmen Sie die Auflösung wie folgt:
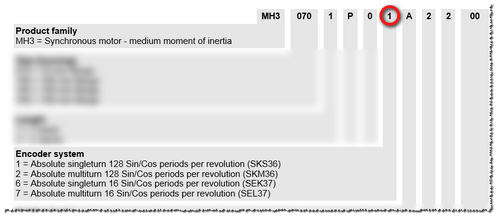
Ziffer 10 des Typcodes des Motors weist das eingebaute Encoder-System aus.
Im Abschnitt "Typcode" in Kapitel 1 der Dokumentation des Motors finden Sie die Anzahl der Sin/Cos-Perioden pro Umdrehung.
Auszug aus einer Motor-Dokumentation
Relevante Geräteparameter des Safety-Moduls
So bearbeiten Sie die relevanten sicherheitsbezogenen Geräteparameter: Im EcoStruxure Machine Expert - Safety-'Geräte'-Fenster, ...
Klicken Sie mit der linken Maustaste auf das Safety-Modul im Gerätebaum.
Blättern Sie im Geräteparametrierungseditor auf der rechten Seite bis zum relevanten Parameterbereich (siehe Tabellenüberschrift unten).
Definieren Sie die in der nachfolgenden Tabelle beschriebenen Parameter für diese Sicherheitsfunktion.
HINWEIS:
Die hier eingegebenen Parameter sind hauptsächlich Überwachungsparameter. Sie definieren das Überwachungsverhalten und bestimmen damit, ob eine Sicherheitsfunktion wie definiert ausgeführt wird oder ob aufgrund eines erkannten Fehlers eine Fallback-Funktion ausgeführt werden muss. Die eigentliche Antriebsparametrierung (z.B. Abbremsparameter, etc.) müssen Sie in EcoStruxure Machine Expert definieren. Siehe Thema "Funktionsbeschreibung".
Detailinformationen zum Wertebereich und Standardwert dieses Parameters finden Sie im entsprechenden Kapitel zum verwendeten Sicherheitsmodul im Handbuch "Parameter und Prozessdaten der Sicherheitsmodule".
|
Parameterbereich: Safe_Maximum_Speed |
|
|
SMS_MaxSpeed |
Definiert die sichere maximale Geschwindigkeit, die zu keiner Zeit überschritten werden darf. Der Wert Einheiten/s hängt von der Auflösung des Drehgebers ab. |
Relevante Ein-/Ausgänge des Funktionsbausteins und Bit im Statuswort
Da die Geschwindigkeitsüberwachung permanent ausgeführt wird, gibt es keinen Bausteineingang, um die Überwachung der SMS-Funktion anzufordern.
Anzeige des Funktionsstatus an Bausteinausgang S_SMS_SafetyActive (SAFETRUE = Sicherheitsfunktion aktiviert)
und Bit 15 im DWORD, ausgegeben an AxisStatus (TRUE = Sicherheitsfunktion aktiviert).