Datenaustausch mit dem ModuleInterface
Wenn mit dem Roboter Daten ausgetauscht werden sollen, kann dies auf mehrere Arten erfolgen.
Der effizienteste Weg ist über das ModuleInterface.
|
Schritt |
Aktion |
|---|---|
|
1 |
Öffnen Sie das ModuleInterface. |
|
2 |
Klicken Sie auf die Schaltfläche |
|
3 |
Klicken Sie auf den Abschnitt der Variablen, um den Typ der Variablen auszuwählen (VAR_INPUT, VAR_OUTPUT, VAR INPUT_OUTPUT, VAR). |
|
4 |
Geben Sie einen Namen für die Variable ein. |
|
5 |
Wählen Sie einen Datentyp aus. |
|
6 |
Als Datentyp können die Standarddatentypen BOOL, LREAL ...) oder anwenderdefinierte Datentypen (zum Beispiel ST_MyStruct) verwendet werden. 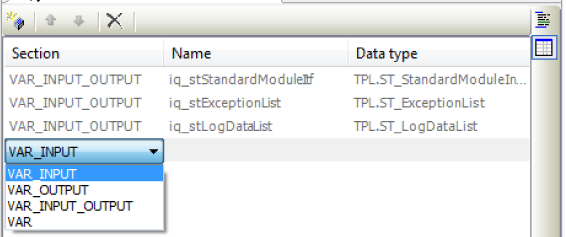
|
|
7 |
Wenn VAR_INPUT, VAR_OUTPUT oder VAR_INPUT_OUTPUT hinzugefügt werden, muss der Aufruf des Roboters aktualisiert werden (siehe Beispiel in Abgleich). |
|
8 |
Wenn Sie die Option zur Codeerzeugung für Non Template-Roboter verwenden, wird der Aufruf des Roboters automatisch aktualisiert. |
|
Schritt |
Aktion |
|---|---|
|
1 |
Klicken Sie mit der rechten Maustaste auf das Objekt Roboter der ... -Serie/Baureihe, um zum Beispiel eine Methode hinzuzufügen. |
|
2 |
Mit der Methode können die Daten des Roboters gesetzt/abgerufen werden. |
|
Schritt |
Aktion |
|---|---|
|
1 |
Fügen Sie eine globale Variable hinzu, um diese im Roboter intern und extern zu nutzen. |
|
2 |
Als Datentyp können die Standarddatentypen BOOL, LREAL ...) oder anwenderdefinierte Datentypen (zum Beispiel ST_MyStruct) verwendet werden. |
Variablen, die in Methoden definiert wurden, sind flüchtig und werden mit jedem Aufruf der Methode neu initialisiert.
|
Schritt |
Aktion |
|---|---|
|
1 |
Klicken Sie auf die Schaltfläche |
|
2 |
Klicken Sie auf den Abschnitt der Variablen und wählen Sie VAR aus. |
|
3 |
Geben Sie einen Namen für die Variable ein. |
|
4 |
Wählen Sie einen Datentyp aus. |
 , um dem
, um dem