Touch Probe als physisches Gerät und als Steuerungsfunktion
Eine Touch Probe als physisches Gerät entspricht einem Stromkreis, der geschlossen bzw. geöffnet wird, sobald etwas den Sensor berührt oder sich diesem nähert, wodurch eine steigende bzw. fallende Flanke ausgelöst und erkannt wird.
Die Touch Probe-Funktion der Steuerung entspricht nicht nur einer steigenden oder fallenden Flanke, sondern umfasst ebenfalls die Rückverfolgung der von der steigenden bzw. fallenden Flanke referenzierten Istposition.
Die Steuerung benötigt Informationen zur absoluten Position des Motors, um die Position der Motordarstellung in der Steuerung mit dem physischen Motor zu synchronisieren. Der Prozess der Erfassung dieser Informationen wird als „Homing“ (Referenzpunktfahrt) bezeichnet. Zur Durchführung dieses Prozesses sind mehrere Möglichkeiten gegeben. So kann beispielsweise bei der Verfahrbewegung bis zu einem Endanschlag das Drehmoment oder der Strom überwacht werden. Die Überschreitung eines maximalen Drehmoments bzw. Stromwerts signalisiert das Erreichen der Home-Position (Referenzpunkt). Eine andere Möglichkeit ist der Einsatz einer Touch Probe, wie im vorliegenden Beispiel.
Anpassung der Softwareparameter
|
Schritt |
Aktion |
|---|---|
|
1 |
Klicken Sie auf Anwendungsbaumstruktur > Anwendung > TemplateFullProgrammingFramework > SR_BravoModule > Init_Slave1, um den Code zur Anpassung der Softwareparameter zu öffnen. |
|
2 |
Stellen Sie Homing-Modus auf Touchprobe (Flanke) ein. |
|
3 |
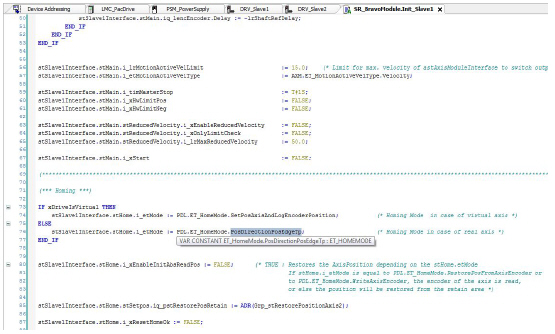
Durchlaufen Sie die Anzeige, bis Sie (*** Homing ***) erreichen, und ändern Sie das Zeilenende in (* Homing Mode in case of real axis *) zu stSlave1Interface.stHome.i_etMode := PDL.ET_HomeMode.PosDirectionPosEdgeTp; (* Homing Mode in case of real axis *). |
Einstellung der Touch Probe-Parameter
Sie befinden sich nach wie vor in SR_BravoModule.Init_Slave1. Durchlaufen Sie die Anzeige bis (* Possible modes for homing mode TouchProbe und ändern Sie die Zeilen unter dem Kommentar:
stSlave1Interface.stHome.stTouchProbe.i_lrHomePosition := 0.0; (* Position at the end of homing in units *)
stSlave1Interface.stHome.stTouchProbe.i_lrVel := 360.0; (* Homing ceiling velocity in units/s *)
stSlave1Interface.stHome.stTouchProbe.i_lrAcc := 10800.0; (* Homing acceleration in units/s^2 *)
stSlave1Interface.stHome.stTouchProbe.i_lrDec := 10800.0; (* Homing deceleration in units/s^2 *)
stSlave1Interface.stHome.stTouchProbe.i_lrJerk := 1E9; (* Homing jerk in units/s^3 *)
stSlave1Interface.stHome.stTouchProbe.i_lrOffset := 280.0; (* Offset from home signal in units *)
stSlave1Interface.stHome.stTouchProbe.i_lrMaxTravel := 370.0; (* Max. travel for referencing by TP *)
stSlave1Interface.stHome.stTouchProbe.i_xRotativeSystem := TRUE; (* Rotative system true or false for referencing by TP *)
stSlave1Interface.stHome.stTouchProbe.i_ifTouchProbe := TP_0; (* Input for TP *)
oi_lrHomePosition bleibt unverändert.
oFühren Sie folgende Aktionen aus:
|
Schritt |
Aktion |
|---|---|
|
1 |
Ändern Sie i_lrVel zu 360.0, um das Homing-Verfahren für die Testsystem zu beschleunigen. |
|
2 |
Ändern Sie i_lrAcc zu 10800.0, um das Homing-Verfahren für die Testsystem zu beschleunigen. |
|
3 |
Ändern Sie i_lrDec zu 10800.0, um das Homing-Verfahren für die Testsystem zu beschleunigen. |
|
4 |
Ändern Sie i_lrJerk zu 1E9, um das Homing-Verfahren für die Testsystem zu beschleunigen. |
|
5 |
Ändern Sie i_lrOffset zu 280.0, um festzulegen, um wie viele Einheiten (in diesem Fall: Grad) sich der Antrieb nach Erkennung des Signals von der Touch Probe bis zur Home-Position fortbewegen soll. |
oi_lrMaxTravel bleibt unverändert.
oi_xRotativeSystem bleibt unverändert.
Online: Übertragung Ihres Projekts in die Steuerung
|
Schritt |
Aktion |
|---|---|
|
1 |
Klicken Sie auf Online > Anmeldung. |
|
2 |
Klicken Sie bei Anzeige der Warnmeldung auf Abbrechen, um den Anmeldevorgang abzubrechen, oder drücken Sie ALT + F, um die Meldung zu bestätigen und die Anmeldung bei der ausgewählten Steuerung vorzunehmen. |
|
3 |
Sobald Sie bei der Steuerung angemeldet sind, bestätigen Sie den Code-Download in die Steuerung. |
|
4 |
Klicken Sie auf Debuggen > Start, um den Code in der Steuerung auszuführen. |
|
Schritt |
Aktion |
|---|---|
|
1 |
Klicken Sie auf Tools-Baumstruktur > Template Full Programming Framework > Visualisierung > VIS_Main. |
|
2 |
Klicken Sie auf Enable Vis und anschließend auf Machine Control. |
|
3 |
Wenn links neben Diag Quit eine andere Meldung als Ok angezeigt wird, klicken Sie auf Diag Quit. |
|
4 |
Klicken Sie auf Prepare und dann auf Start. Die Servoachse dreht sich und stoppt bei 280 Grad (der Wert von stSlave1Interface.stHome.stTouchProbe.i_lrOffset). |
|
Schritt |
Aktion |
|---|---|
|
1 |
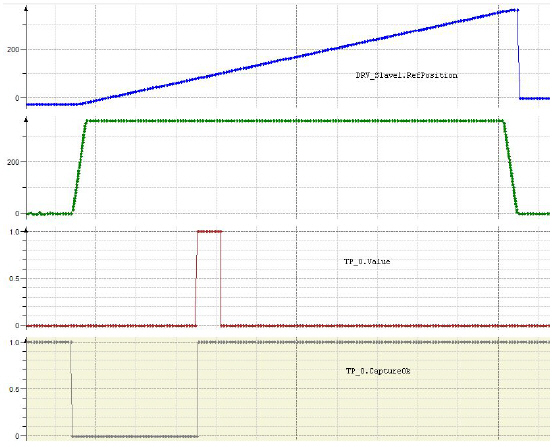
Um einem Trace eine Variable hinzuzufügen, klicken Sie mit der rechten Maustaste auf die betreffende Variable, klicken Sie auf Dem Trace eine Variable hinzufügen und wählen Sie einen vorhandenen Trace oder die Option Neuer Trace aus. Um das Homing-Verfahren mit der Touch Probe nachzuverfolgen, fügen Sie Value und CaptureOk der Touch Probe sowie RefPosition und RefVelocity des Servoantriebs hinzu. |
|
2 |
Sobald Sie dem Trace die nachzuverfolgenden Variablen hinzugefügt haben, müssen Sie den Trace in die Steuerung herunterladen. Öffnen Sie den Trace in der Tools-Baumstruktur, klicken Sie mit der rechten Maustaste auf den Trace und klicken Sie dann auf Trace Download. |
|
3 |
Nach dem Download des Traces in die Steuerung können Sie auf Trace starten klicken. |
|
4 |
Warten Sie bis zum Ende des Homing-Verfahrens und klicken Sie dann auf Trace anhalten. |
Bei der steigenden Flanke des Signals von der Touch Probe (TP_0.Value) wird TP_0.CaptureOk auf 1 gesetzt, und ab diesem Zeitpunkt wird DRV_Slave1.RefPosition um weitere 280 Grad erhöht und dann angehalten.