Using the library with other versions of software or firmware may have results other than described in the present documentation.
|
|
|
UNINTENDED EQUIPMENT OPERATION |
|
oBe sure that the software and firmware are of the versions supported by this library. oContact your Schneider Electric service representative for compatibility information. |
|
Failure to follow these instructions can result in death, serious injury, or equipment damage. |
oPacDrive LMC Eco
oPacDrive LMC Pro
oPacDrive LMC Pro2
oSoMachine Motion V4.3 SP1
PacDrive 3 V4.3 SP1
oPacDrive LMC Eco V1.54.20.3 or greater
oPacDrive LMC Pro V1.54.20.3 or greater
oPacDrive LMC Pro2 V1.54.20.3 or greater
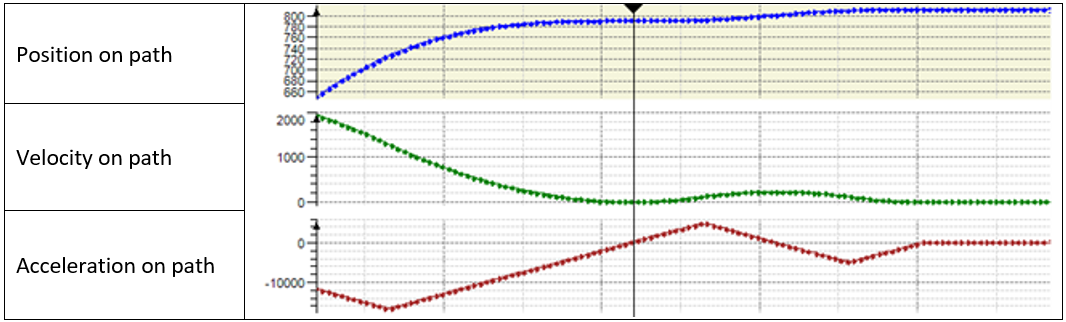
In several situations, the velocity of the path movement gets zero during the movement.
Situations
1.The path movement of the robot is in the deceleration phase to its end position. A motion command IF_RobotMotion.MoveL(…), IF_RobotMotion.MoveC(…), or IF_RobotMotion.MoveS(…) is sent to extend the path movement of the robot.
2.A IF_RobotMotion.SetStopOnPath(…) command is active and the path movement of the robot is in the deceleration phase to the stop position on path. The stop-on-path is reset by the IF_RobotMotion.ResetStopOnPath(…) command.
3.The parameter IF_RobotMotion.lrVelOverride was set to 0.0 and the path movement of the robot is in the deceleration phase to stop-on-path. The parameter IF_RobotMotion.lrVelOverride is set to a value greater than 0.0.
4.FB_Robot.xStart was set to FALSE and the path movement of the robot is in the deceleration phase to stop-on-path. FB_Robot.xStart is set to TRUE again.
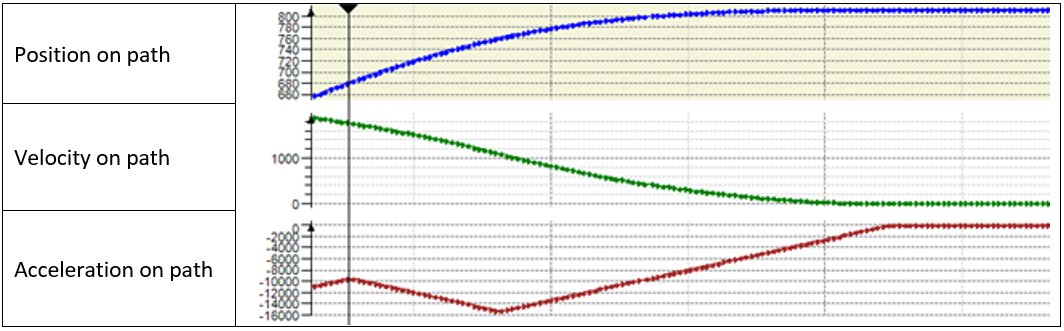
If it is possible, a motion profile is calculated without zero velocity during the path movement.
If it is possible, a motion profile is calculated without zero velocity during the path movement.
oNone
oIn several situations, the diagnostic message ET_Diag.UnexpectedProgramBehavior was returned by the robot in connection with calculating the estimated stop position of the TCP on the connected path. Calculating the estimated stop position is improved.
oIf a ColdStart of the robot is performed, a previously asynchronous movement of an auxiliary axis is cleared.
oIf IF_RobotMotion.ClearSegmentsFromId(i_udiSegmentId := 0) is called to clear all motion jobs, all Tracking- or MoveAsync-events also cleared.
oIf the tracking direction of a linear tracking system is configured to ET_RobotComponent.CartesianY or ET_RobotComponent.CartesianZ, modifying the linear tracking system by calling IF_RobotConfigurationAdvanced.ModifyCoordinateSystem2(…) is fully supported.
