MotorTwoSpeedsTwoDirections - Functional Description
|
Type: |
Function block |
|
Available as of: |
V1.0.0.0 |
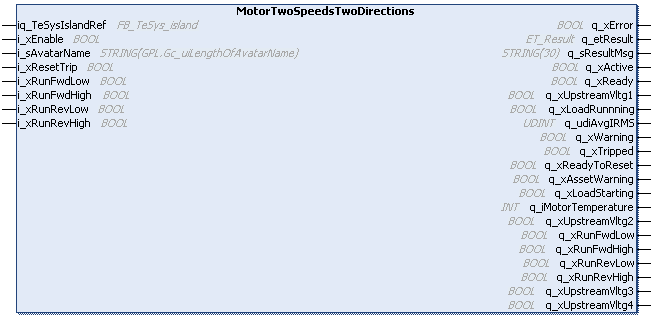
The function block MotorTwoSpeedsTwoDirections is used to manage a two speed motor in two directions (forward and reverse).
|
Input |
Data type |
Description |
|---|---|---|
|
iq_TeSysIslandRef |
FB_TeSys_island |
Reference to the TeSys island device. |
|
i_xEnable |
BOOL |
A rising edge at the input i_xEnable starts the cyclic and acyclic data exchange between the function block and the selected avatar. As long as i_xEnable is TRUE the cyclic data is exchanged every controller cycle and the acyclic parameters are updated sequential in the order, they are defined in the function block. A falling edge at the input i_xEnable stops the data exchange and active acyclic commands. Refer to Behavior of the Function Blocks with the Input i_xEnable. |
|
i_sAvatarName |
Reference to the avatar defined in the TeSys island configuration. |
|
|
i_xResetTrip |
BOOL |
If this input is set to TRUE, a detected trip error is reset. |
|
i_xRunFwdLow |
BOOL |
If this input is set to TRUE, the motor starts in forward direction with low speed. |
|
i_xRunFwdHigh |
BOOL |
If this input is set to TRUE, the motor starts in forward direction with high speed. |
|
i_xRunRevLow |
BOOL |
If this input is set to TRUE, the motor starts in reverse direction with low speed. |
|
i_xRunRevHigh |
BOOL |
If this input is set to TRUE, the motor starts in reverse direction with high speed. |
|
Output |
Data type |
Description |
|---|---|---|
|
q_xError |
BOOL |
If this output is set to TRUE, an error has been detected. For details, refer to q_etResult and q_etResultMsg. |
|
q_etResult |
Provides diagnostic and status information as a numeric value. |
|
|
q_sResultMsg |
STRING[30] |
Provides additional diagnostic and status information as a text message. |
|
q_xActive |
BOOL |
If the function block is active, this output is set to TRUE. |
|
q_xReady |
BOOL |
Indicates TRUE if the function block is ready to receive an execute command. |
|
q_xUpstreamVltg1 |
BOOL |
If this output is set to TRUE, the avatar has detected that upstream main power of the first device is present (breaker closed). |
|
q_xLoadRunning |
BOOL |
If this output is set to TRUE, a Run or Close command has been executed and current is flowing in the poles (equivalent to motor running but also for non-motor avatars). (Unit: mA) |
|
q_udiAvgIRMS |
UDINT |
Indicates the average of the most recent phase current IRMS values. (Unit: mA) |
|
q_xWarning |
BOOL |
If this output is set to TRUE, a protection event has been detected by the avatar. |
|
q_xTripped |
BOOL |
If this output is set to TRUE, a protection trip event has been detected by the avatar. |
|
q_xReadyToReset |
BOOL |
If this output is set to TRUE, the avatar meets the trip reset conditions and can be reset with a trip reset command. |
|
q_xAssetWarning |
BOOL |
If this output is set to TRUE, a power device or SIL Interface Module within the avatar have reached or exceeded 90% of the rated number of operations (per avatar parameter). |
|
q_xLoadStarting |
BOOL |
If this output is set to TRUE, the motor is in start phase. |
|
q_iMotorTemperature |
INT |
Indicates the temperature of the motor in 0.1 °C scaling unit. Depending on temperature sensor type, the range is: o–200...850°C (–328...1562°F) (for PT100) o–200...600°C (–328...1112°F) (for PT1000) o–60...180°C (–76...356°F) (for NI 100/1000) |
|
q_xUpstreamVltg2 |
BOOL |
If this output is set to TRUE, the avatar has detected that upstream main power of the second device (if available) is present. |
|
q_xRunFwdLow |
BOOL |
If this output is set to TRUE, the motor is running in low speed. If this output is set to FALSE, the motor is stopped or is running in high speed. |
|
q_xRunFwdHigh |
BOOL |
If this output is set to TRUE, the motor is running in high speed. If this output is set to FALSE, the motor is stopped or is running in low speed. |
|
q_xRunRevLow |
BOOL |
If this output is set to TRUE, the low speed reverser switch is closed. |
|
q_xRunRevHigh |
BOOL |
If this output is set to TRUE, the high speed reverser switch is closed. |
|
q_xUpstreamVltg3 |
BOOL |
If this output is set to TRUE, the avatar has detected that upstream main power of the third device (if available) is present. |
|
q_xUpstreamVltg4 |
BOOL |
If this output is set to TRUE, the avatar has detected that upstream main power of the fourth device (if available) is present. |