MotorYDTwoDirections - Description fonctionnelle
|
Type : |
Bloc fonction |
|
Disponible à partir de : |
V1.0.0.0 |
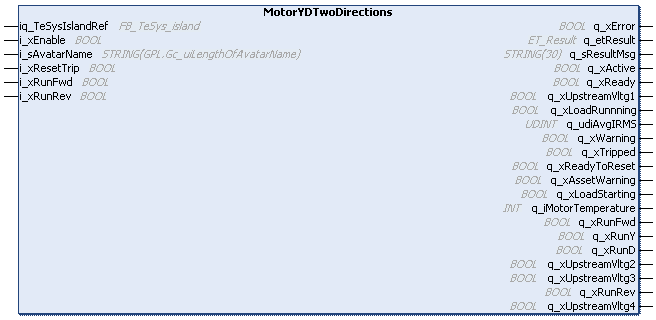
Le bloc fonction MotorYDTwoDirections permet de gérer un moteur wye/delta (en étoile/triangle) dans deux sens (avant et arrière).
|
Entrée |
Type de données |
Description |
|---|---|---|
|
iq_TeSysIslandRef |
FB_TeSys_island |
Référence à l’équipement TeSys island. |
|
i_xEnable |
BOOL |
Un front montant sur l'entrée i_xEnable lance l’échange des données cycliques et acycliques entre le bloc fonction et l’avatar sélectionné. Tant que l’entrée i_xEnable est TRUE, les données cycliques sont échangées à chaque cycle du contrôleur et les paramètres acycliques sont mis à jour de manière séquentielle suivant l’ordre dans lequel ils sont définis dans le bloc fonction. Un front descendant sur l'entrée i_xEnable arrête l’échange des données et les commandes acycliques actives. Consultez la section Fonctionnement des blocs fonction avec l’entrée i_xEnable. |
|
i_sAvatarName |
Référence à l’avatar défini dans la configuration TeSys island. |
|
|
i_xResetTrip |
BOOL |
Si cette entrée est réglée sur TRUE, une erreur de déclenchement détectée est réinitialisée. |
|
i_xRunFwd |
BOOL |
Si cette entrée est réglée sur TRUE, le commutateur avant de l’avatar est fermé. |
|
i_xRunRev |
BOOL |
Si cette entrée est réglée sur TRUE, le commutateur arrière de l’avatar est fermé. |
|
Sortie |
Type de données |
Description |
|---|---|---|
|
q_xError |
BOOL |
Si cette sortie est TRUE, une erreur a été détectée. Pour plus d'informations, reportez-vous à q_etResult et q_etResultMsg. |
|
q_etResult |
Fournit des informations de diagnostic et d'état sous la forme d'une valeur numérique. |
|
|
q_sResultMsg |
STRING[30] |
Fournit des informations de diagnostic et d'état sous la forme d'un message textuel. |
|
q_xActive |
BOOL |
Si le bloc fonction est actif, cette sortie est TRUE. |
|
q_xReady |
BOOL |
Indique TRUE si le bloc fonction est prêt à recevoir une commande d'exécution. |
|
q_xUpstreamVltg1 |
BOOL |
Si cette sortie est réglée sur TRUE, l’avatar a détecté que l’alimentation principale en amont du premier équipement était présente (disjoncteur fermé). |
|
q_xLoadRunning |
BOOL |
Si cette sortie est réglée sur TRUE, une commande Run ou Close a été exécutée et le courant circule au niveau des pôles (équivalent à un moteur en fonctionnement, mais également pour les avatars autres que des moteurs). (Unité : mA) |
|
q_udiAvgIRMS |
UDINT |
Indique la moyenne des valeurs efficaces de courant de phase les plus récentes. (Unité : mA) |
|
q_xWarning |
BOOL |
Si cette sortie est réglée sur TRUE, un événement de protection a été détecté par l'avatar. |
|
q_xTripped |
BOOL |
Si cette sortie est réglée sur TRUE, un événement de déclenchement de protection a été détecté par l’avatar. |
|
q_xReadyToReset |
BOOL |
Si cette sortie est réglée sur TRUE, l’avatar satisfait les conditions de réinitialisation des déclenchements et peut être réinitialisé à l’aide d’une commande de réinitialisation des déclenchements. |
|
q_xAssetWarning |
BOOL |
Si cette sortie est réglée sur TRUE, un dispositif d’alimentation ou un module d’interface SIL dans l’avatar a atteint ou dépassé 90 % du nombre nominal d'opérations (conformément au paramètre avatar). |
|
q_xLoadStarting |
BOOL |
Si cette sortie est réglée sur TRUE, le moteur est en phase de démarrage. |
|
q_iMotorTemperature |
INT |
Indique la température du moteur en unité d'échelle 0,1 °C. Selon le type de capteur de température, la plage admise est la suivante : o–200 à 850 °C (–328 à 1 562 °F) (pour PT100) o–200 à 600°C (–328 à 1112°F) (pour PT1000) o-60 à 180°C (-76 à 356°F) (pour NI 100/1000) |
|
q_xRunFwd |
BOOL |
Si cette sortie est réglée sur TRUE, le commutateur avant de l’avatar est fermé. |
|
q_xRunY |
BOOL |
Si cette sortie est réglée sur TRUE, le commutateur Y de Moteur Y/D avatars est fermé. |
|
q_xRunD |
BOOL |
Si cette sortie est réglée sur TRUE, le commutateur D de Moteur Y/D avatars est fermé. |
|
q_xUpstreamVltg2 |
BOOL |
Si cette sortie est réglée sur TRUE, l’avatar a détecté que l’alimentation principale en amont du deuxième équipement (si disponible) était présente. |
|
q_xUpstreamVltg3 |
BOOL |
Si cette sortie est réglée sur TRUE, l’avatar a détecté que l’alimentation principale en amont du troisième équipement (si disponible) était présente. |
|
q_xRunRev |
BOOL |
Si cette sortie est réglée sur TRUE, le commutateur arrière de l’avatar est fermé. |
|
q_xUpstreamVltg4 |
BOOL |
Si cette sortie est réglée sur TRUE, l’avatar a détecté que l’alimentation principale en amont du quatrième équipement (si disponible) était présente. |