MotorTwoSpeeds - Descrizione funzionale
|
Tipo: |
Blocco funzione |
|
Disponibile a partire da: |
V1.0.0.0 |
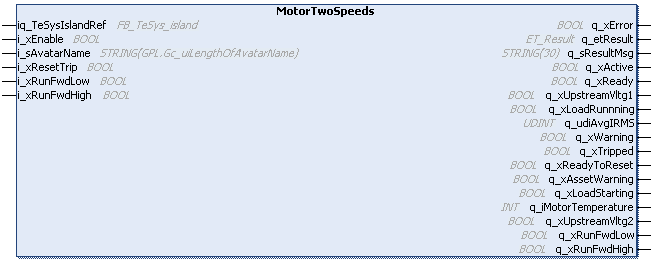
Il blocco funzione MotorTwoSpeeds consente di gestire un motore a due velocità.
|
Ingresso |
Tipo di dati |
Descrizione |
|---|---|---|
|
iq_TeSysIslandRef |
FB_TeSys_island |
Riferimento al dispositivo TeSys island |
|
i_xEnable |
BOOL |
Un fronte di salita all'ingresso i_xEnable avvia lo scambio dati ciclico e aciclico tra il blocco funzione e l'avatar selezionato. Finché i_xEnable è TRUE, i dati ciclici vengono scambiati a ogni ciclo del controller e i parametri aciclici vengono aggiornati sequenzialmente nell'ordine in cui sono definiti nel blocco funzione. Un fronte di discesa all'ingresso i_xEnable arresta lo scambio di dati e attiva i comandi aciclici. Vedere la sezione Comportamento dei blocchi funzione con l'ingresso i_xEnable. |
|
i_sAvatarName |
Fare riferimento all'avatar definito nella configurazione TeSys island. |
|
|
i_xResetTrip |
BOOL |
Se questo ingresso è impostato su TRUE, viene azzerato un errore di sgancio rilevato. |
|
i_xRunFwdLow |
BOOL |
Se questo ingresso è impostato su TRUE, il motore si avvia in direzione avanti a bassa velocità. |
|
i_xRunFwdHigh |
BOOL |
Se questo ingresso è impostato su TRUE, il motore si avvia in direzione avanti ad alta velocità. |
|
Uscita |
Tipo di dati |
Descrizione |
|---|---|---|
|
q_xError |
BOOL |
Se questa uscita è impostata su TRUE, è stato rilevato un errore. Per informazioni, consultare q_etResult e q_etResultMsg. |
|
q_etResult |
Fornisce informazioni su stato e diagnostica come valore numerico. |
|
|
q_sResultMsg |
STRING[30] |
Fornisce ulteriori informazioni su stato e diagnostica come messaggio di testo. |
|
q_xActive |
BOOL |
Se il blocco funzione è attivo, questa uscita è impostata a TRUE. |
|
q_xReady |
BOOL |
Indica TRUE se il blocco funzione è pronto a ricevere un comando di esecuzione. |
|
q_xUpstreamVltg1 |
BOOL |
Se questa uscita è impostata su TRUE, l'avatar ha rilevato che l'alimentazione principale a monte del primo dispositivo è presente (interruttore chiuso). |
|
q_xLoadRunning |
BOOL |
Se questa uscita è impostata su TRUE, è stato eseguito un comando Run o Close e la corrente scorre nei poli (equivalente al motore in funzione ma anche per avatar diversi dai motori). (Unità: mA) |
|
q_udiAvgIRMS |
UDINT |
Indica la media dei valori IRM di corrente di fase più recenti. (Unità: mA) |
|
q_xWarning |
BOOL |
Se questa uscita è impostata su TRUE, è stato rilevato un evento di protezione dall'avatar. |
|
q_xTripped |
BOOL |
Se questa uscita è impostata su TRUE, è stato rilevato un evento di sgancio di protezione dall'avatar. |
|
q_xReadyToReset |
BOOL |
Se questa uscita è impostata su TRUE, l'avatar soddisfa le condizioni di azzeramento sgancio e può essere azzerato con un comando di azzeramento sgancio. |
|
q_xAssetWarning |
BOOL |
Se questa uscita è impostata su TRUE, un dispositivo di potenza o modulo interfaccia SIL nell'avatar ha raggiunto o superato il 90% del numero nominale di operazioni (per parametro avatar). |
|
q_xLoadStarting |
BOOL |
Se questa uscita è impostata su TRUE, il motore è in fase di avvio. |
|
q_iMotorTemperature |
INT |
Indica la temperatura del motore in unità di scala 0,1 °C. In base al tipo di sensore di temperatura, l'intervallo è: o–200...850°C (–328...1562°F) (per PT100) o–200...600°C (–328...1112°F) (per PT1000) o–60...180°C (–76...356°F) (per NI 100/1000) |
|
q_xUpstreamVltg2 |
BOOL |
Se questa uscita è impostata su TRUE, l'avatar ha rilevato che l'alimentazione principale a monte del secondo dispositivo (se disponibile) è presente. |
|
q_xRunFwdLow |
BOOL |
Se questa uscita è impostata su TRUE, il motore funziona a bassa velocità. Se questa uscita è impostata su FALSE, il motore è fermo o in funzione ad alta velocità. |
|
q_xRunFwdHigh |
BOOL |
Se questa uscita è impostata su TRUE, il motore funziona ad alta velocità. Se questa uscita è impostata su FALSE, il motore è fermo o in funzione a bassa velocità. |