FB_MotorSerialNumberWrite - 一般信息
|
类型: |
功能块 |
|
适用的版本: |
V1.1.1.5 |
|
继承: |
– |
|
实现: |
– |
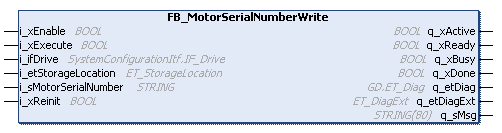
写入电机的序列号。
此功能块用于写入电机电子铭牌中的电机序列号。
|
输入 |
数据类型 |
描述 |
|---|---|---|
|
i_xEnable |
BOOL |
上升沿 FALSE -> TRUE 激活 POU,下降沿 TRUE -> FALSE 禁用 POU。 停用的 POU 不执行任何操作。 |
|
i_xExecute |
BOOL |
FALSE -> TRUE:POU 将电机序列号数据写入到所选择的轴中。在写入期间,q_xBusy = TRUE。一旦写入操作完成,q_xDone 便更改为 TRUE。 |
|
i_ifDrive |
要控制的轴的输入。 |
|
|
i_etStorageLocation |
写入序列号的存储位置(缺省值:驱动器)。 |
|
|
i_sMotorSerialNumber |
STRING |
电机序列号,最多 20 个字符 |
|
i_xReinit |
BOOL |
TRUE:写入电机序列号之后,对驱动器执行重新初始化,且重新读取电机铭牌。 FALSE:不对驱动器执行重新初始化,且不重新读取电机铭牌。 |
|
输出 |
数据类型 |
描述 |
|---|---|---|
|
q_xActive |
BOOL |
TRUE:POU 已激活且必须进一步执行。 FALSE:POU 未激活。 |
|
q_xReady |
BOOL |
TRUE:POU 已准备好运行并可接受用户命令。 FALSE:此功能块未做好接受用户命令的准备。 |
|
q_xBusy |
BOOL |
TRUE:POU 执行所发布的用户命令。 FALSE:POU 正等待其他用户命令。 |
|
q_xDone |
BOOL |
TRUE:用户命令已被执行。 FALSE:用户命令正被执行,或者尚未发布任何用户命令。 |
|
q_etDiag |
诊断中的一般性陈述(与库无关)。 一个不等于 GD.ET_Diag.Ok 的值与一条诊断消息对应。 |
|
|
q_etDiagExt |
诊断上特定于 POU 的输出。 q_etDiag = GD.ET_Diag.Ok -> 状态消息 q_etDiag <> GD.ET_Diag.Ok -> 诊断消息 |
|
|
q_sMsg |
STRING[80] |
事件触发的消息,更详细地描述诊断状态。 |
|
q_etDiag |
q_etDiagExt |
枚举值 |
描述 |
|---|---|---|---|
|
OK |
16 |
POU 已被禁用。 |
|
|
OK |
10 |
命令已成功执行。 |
|
|
OK |
46 |
正在执行 POU。 |
|
|
OK |
3 |
POU 正等待执行。 |
|
|
OK |
2 |
POU 正等待 Sercos 相 2。 |
|
|
DriveConditionInvalid |
45 |
所选择的轴不允许此操作。 |
|
|
InputParameterInvalid |
4 |
驱动器不支持此功能。 |
|
|
InputParameterInvalid |
18 |
输入的字符串过长。 |
|
|
SercosConditionInvalid |
7 |
无法执行 Sercos 通讯。 |
|
枚举名称: |
Disabled |
|
枚举值: |
16 |
|
描述: |
POU 已被禁用。 |
|
原因 |
解决方案 |
|---|---|
|
POU 已被禁用。 |
将 i_xEnable 输入从 FALSE 设置为 TRUE,以启用 POU。 |
|
枚举名称: |
Done |
|
枚举值: |
10 |
|
描述: |
命令已成功执行。 |
电机序列号写入成功。
|
枚举名称: |
Executing |
|
枚举值: |
46 |
|
描述: |
正在执行 POU。 |
正在执行 POU。
FunctionNotSupportedByThisDevice
|
枚举名称: |
FunctionNotSupportedByThisDevice |
|
枚举值: |
4 |
|
描述: |
驱动器不支持此功能。 |
|
原因 |
解决方案 |
|---|---|
|
无效的对象类型 |
确认所选择的对象。 |
|
枚举名称: |
InputStringTooLarge |
|
枚举值: |
18 |
|
描述: |
输入的字符串过长。 |
|
原因 |
解决方案 |
|---|---|
|
指定的电机序列号超过 20 个字符。 |
将电机序列号指定为少于 20 个字符。 |
|
枚举名称: |
OperationNotAllowed |
|
枚举值: |
45 |
|
描述: |
所选择的轴不允许此操作。 |
|
原因 |
解决方案 |
|---|---|
|
所选择的轴不允许此操作,例如原因在于使用了 Schneider Electric 伺服电机。 |
选择允许此操作的轴。 |
SercosCommunicationNotPossible
|
枚举名称: |
SercosCommunicationNotPossible |
|
枚举值: |
7 |
|
描述: |
无法执行 Sercos 通讯。 |
|
原因 |
解决方案 |
|---|---|
|
无法执行 Sercos 通讯。 |
确认 Sercos 相和接线。 |
|
枚举名称: |
WaitForExecute |
|
枚举值: |
3 |
|
描述: |
POU 正等待执行。 |
POU 已激活并准备好执行。q_xReady 为 TRUE。
|
枚举名称: |
WaitForSercosPhase2 |
|
枚举值: |
2 |
|
描述: |
POU 正等待 Sercos 相 2。 |
POU 已激活并正等待 Sercos 相 2。q_xReady 为 FALSE。