Verhalten von IF_RobotMotion.lrVelOverride
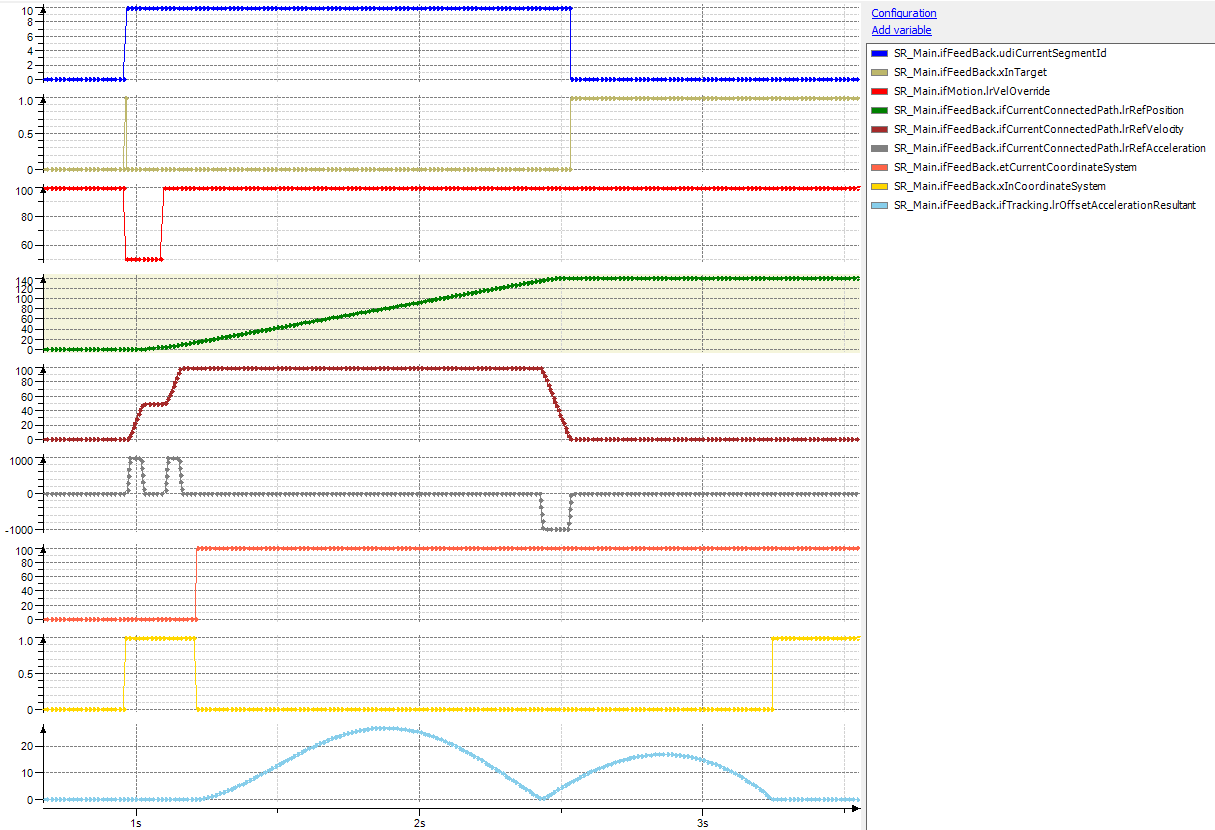
Wenn der Wert von IF_RobotMotion.lrVelOverride während der Bewegung verringert wird, dann erreicht der Roboter seine Endposition später. Folglich wird das Tracking früher abgeschlossen. Es erfolgt keine Neuberechnung der Werte.
Wenn der Wert von IF_RobotMotion.VelOverride vor dem Start der Tracking-Synchronphase verringert wird, wird er für die Tracking-Berechnungen berücksichtigt.
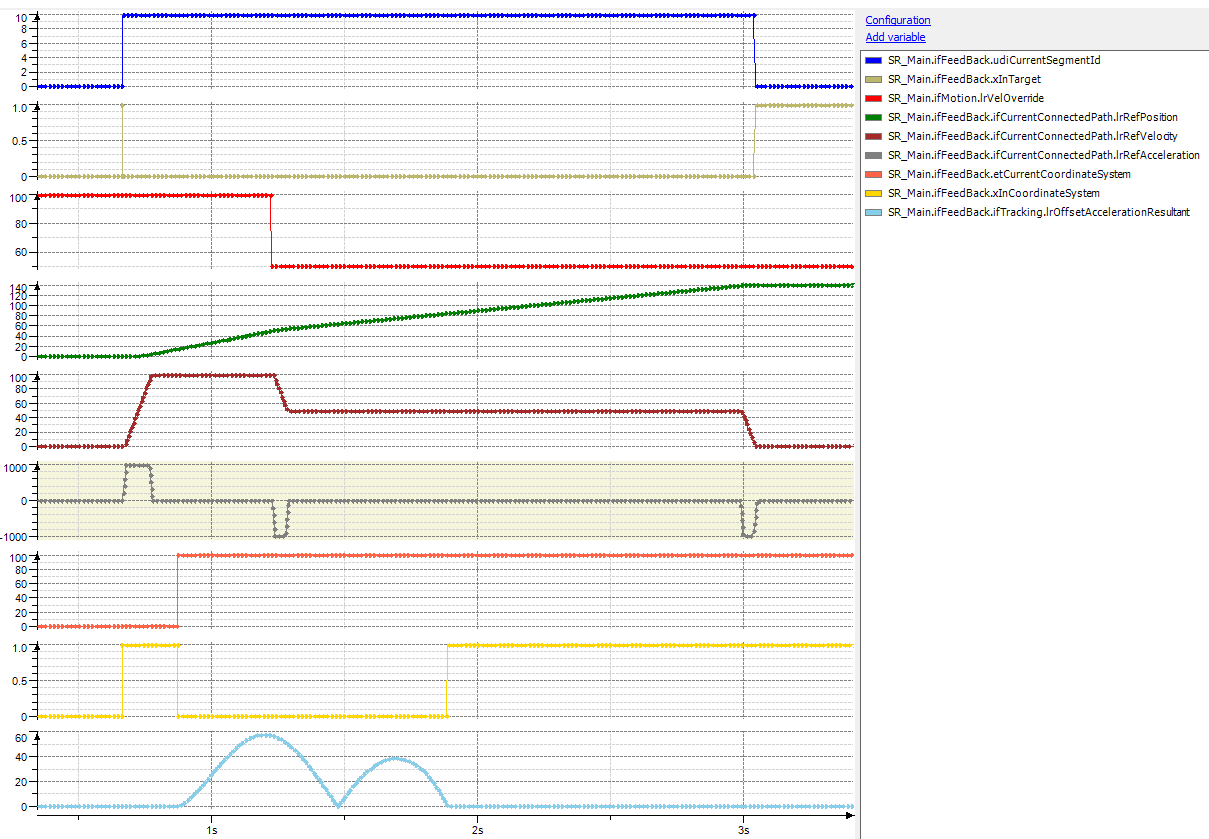
Falls IF_RobotMotion.lrVelOverride erhöht wird, erreicht der Roboter seine Endposition früher. Da die Tracking-Daten nicht erneut berechnet werden, wird das Tracking später abgeschlossen.
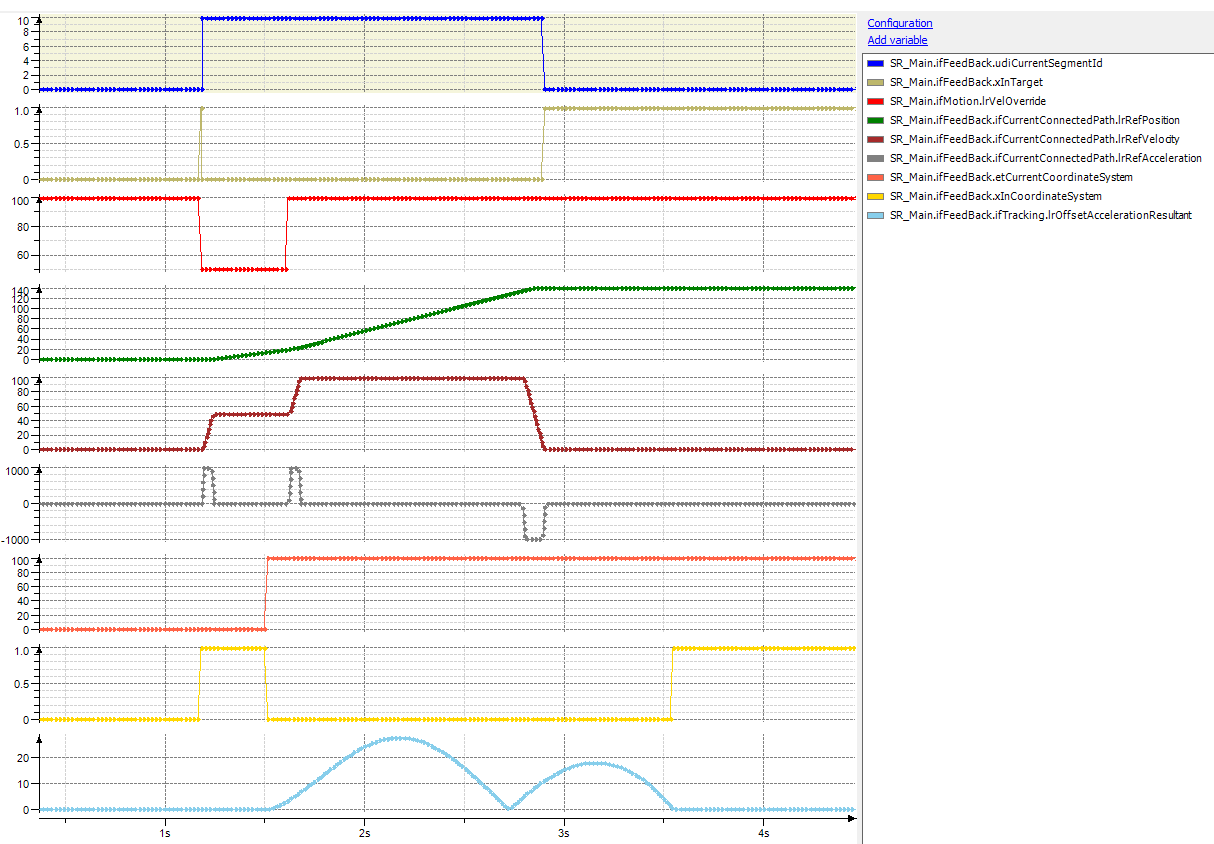
Wenn der Wert von IF_RobotMotion.VelOverride vor dem Start der Tracking-Synchronphase erhöht wird, wird er für die Tracking-Berechnungen berücksichtigt.
Auch wenn IF_RobotMotion.lrVelOverride vor dem Start der Synchronphase erhöht wird, ist das Verhalten identisch. Die Werte für das Tracking werden nicht neu berechnet.