Komponenten der CODESYS SoftMotion
CODESYS SoftMotion ist ein Softwarepaket, das als Entwicklungs- und Laufzeitumgebung für Motionsteuerungen dient. Es gliedert sich wie folgt:
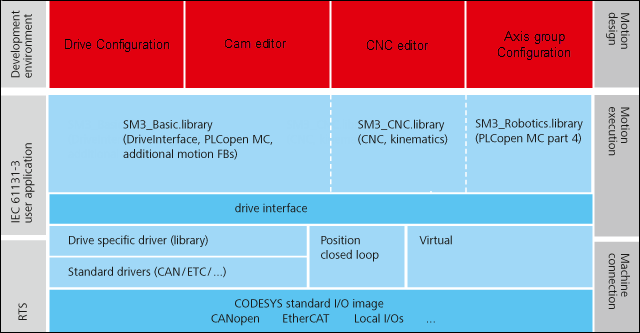
Die Antriebskonfiguration (Drive Configuration): Sie stellt einen Editor zur Verfügung, mit dem Sie die Struktur und Konfiguration der Antriebshardware über die CODESYS-Benutzeroberfläche einstellen können. Dabei wird eine Instanz eines IEC-Funktionsbausteins erzeugt, der den Antrieb repräsentiert. Dieser Baustein kommuniziert automatisch mit den Antrieben, ohne zusätzlichen Aufwand für den IEC-Programmierer. Er sorgt für die Übermittlung von aktualisierten Daten.
Zur Steuerung der Antriebe kann das IEC-Programm den Antrieb über die Funktionsbausteine der SoftMotion-Bibliotheken ansprechen. Alternativ können Sie zu diesem Zweck auch eigene Funktionsbausteine entwickeln. Durch diese Funktionsbausteine werden die Sollwerte (für Position, Geschwindigkeit, Beschleunigung, etc.) zyklisch geschrieben.
Hinweis: Das Produkt SoftMotion Light ist Bestandteil der Standardinstallation von CODESYS. Es bietet die Möglichkeit, Achsen zu kommandieren. Dabei gibt CODESYS nur die Zielposition vor und wartet auf die Rückmeldung des Achsreglers. Die Bewegungsplanung wird vom Achsregler übernommen. Eine koordinierte Bewegung mehrerer Achsen durch CODESYS ist dabei nicht möglich.
Der Kurvenscheibeneditor (Cam editor): Sie können innerhalb des Editors eine Kurvenscheibe graphisch oder mit Hilfe von Tabellen beschreiben. CODESYS erzeugt daraus eine globale Instanz einer Datenstruktur, die die Kurvenscheibe beschreibt. Diese wird an die Applikation übergeben, wo die geeigneten POUs auf sie zugreifen können.
Der CNC-Editor (CNC editor): Mit diesem Editor können Sie mehrdimensionale Bewegungen erzeugen. Sie können die CNC-Bahn mit einem Texteditor (angelehnt an DIN 66025) oder mit einem grafischen Editor erstellen. Alternativ zum Texteditor können Sie in einer vereinfachten Tabellenansicht arbeiten.
Die Achsgruppenkonfiguration (Axis group configuration): Eine Achsgruppe beschreibt die Beziehungen mehrerer mechanisch abhängiger Achsen, die gemeinsam ein Werkzeug oder einen Greifer im Raum positionieren und orientieren. Mit dem Konfigurator wählen Sie die verwendete Kinematik aus und konfigurieren sie. Außerdem können Sie die SoftMotion-Achsen zuordnen.
Die Bibliothek SM3_Basic ist eine Basisbibliothek für alle SoftMotion-Applikationen. Sie enthält insbesondere:
PLCopen-Funktionsbausteine gemäß dem PLCopen-Standard. Sie können mit den Bausteinen einachsige Bewegungen oder Master-/Slavebewegungen zweier Achsen steuern (Elektrische Kurvenscheibe, elektrisches Getriebe).
Zusätzliche Bausteine, die nicht durch PLCopen-Funktionalitäten abgedeckt sind.
Hilfsfunktionen: zum Beispiel zur Handhabung von Dateien oder für Fehlermeldungen.
Die Bibliothek SM3_CNC basiert auf der Bibliothek SM3_Basic. Neben einigen Funktionsbausteinen für kinematische Transformationen stellt sie alle POUs zur Verfügung, die zur Erzeugung, Ausführung und Visualisierung von CNC-Bewegungen benötigt werden. Sie stellt auch Funktionsbausteine zur Bahnvorverarbeitung und Bahnrekonstruktion zur Verfügung.
Die Bibliothek SM3_Robotics. Enthält Funktionsbausteine nach PLCopen Part 4 für Robotik und zusätzliche Funktionsbausteine. Die zugehörige Bibliothek SM3_Transformations enthält die unterstützten kinematischen Transformationen.
Die Antriebsschnittstelle (Drive interface) ist Teil der Bibliothek SM3_Basic und zuständig für die Kommunikation zwischen IEC-Programm und Antrieben. CODESYS SoftMotion stellt für die unterstützten Antriebe Bibliotheken zur Verfügung, die diese Antriebsschnittstelle implementieren.
Info
Beachten Sie die Beschreibung der SoftMotion-Beispielprogramme.