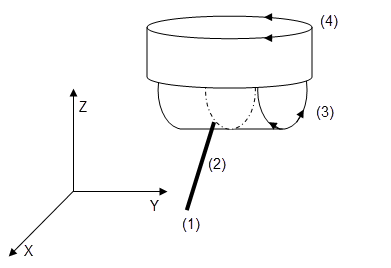
Mit der 5-Achs-Transformation können Sie eine Kinematik steuern, die aus 3 linearen Raumachsen (X, Y, Z) und einem Werkzeugkopf besteht. Der Werkzeugkopf besteht aus 2 Achsen, die das Werkzeug tragen. Eine Werkzeugachse dreht um die Z-Achse, die andere kippt das Werkzeug gemäß dem folgendem Schema.
Parameter: Länge des Werkzeugs dTool = Abstand vom Bearbeitungspunkt (Werkzeugspitze = TCP) zur Drehachse Inklination.
Steuerung der 5-Achs-Transformation über 5 Positionswerte:
X/Y/Z-Position des Bearbeitungspunktes (TCP), die in pi.dX, pi.dY, pi.dZ enthalten ist. Einheit: Positionseinheiten der Achsen.
Orientierung des Werkzeugs über Kugelkoordinaten (Inklination und Azimut), die in pi.dB und pi.dC enthalten sind. Einheit: Winkelgrad.

Nullstellung
Der Bearbeitungspunkt (TCP) befindet sich an der Position (0/0/-dTool).
Das Werkzeug streckt sich in Richtung der negativen Z-Achse aus. Die Drehachse Inklination steht so, dass ein Drehen in positiver Richtung das Werkzeug in Richtung der positiven X-Achse bewegen würde.
Beispiel
Bei der Fahrt in N30 wird die Inklinationsachse, die zunächst leicht in Richtung X zeigt, gedreht und steht zum Ende der Fahrt ebenso verkippt in negativer X-Richtung.
N0 PB360 PC360 (set axis B and C in modulo mode 360)
N10 F10 FB100 FC100 (velocity in X/Y/Z: 10, in B and C 100)
N20 G0 X0 Y0 Z0 C0 B30 (start position)
N30 G1 X20 B-30 (target position)
Siehe auch