The Conveyor mode section provides a tab for each operation mode:
oHoming
oManual
oEndless
oPositioning
oBrake release
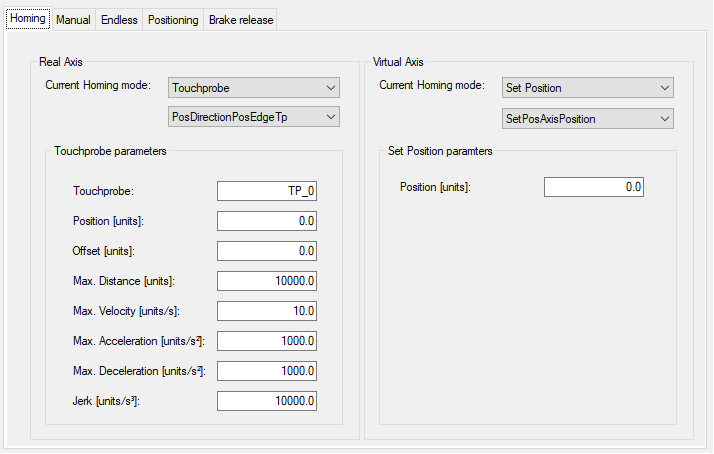
The Homing tab allows you to select and parameterize the homing mode for a Real Axis (left-hand side) and for a Virtual Axis (right-hand side).
Selecting and parameterizing the homing mode for a Real Axis or for a Virtual Axis is done in the same way.
All homing modes of the AxisModule are supported (refer to PD_AxisModule Library Guide, AXM.ST_ModuleInterface.ST_Home).
Real Axis / Virtual Axis
|
Element |
Description |
|---|---|
|
Current Homing Mode |
Select a homing mode (for details see below): oTouchprobe oInput oLimit Switch oTorque oMove Position oSet Position oRestore oWrite Position Additionally you can select different parameters for the homing mode. For example, for Touchprobe you can select PosDirectionPosEdgeTp. |
|
<Homing Mode> Parameters |
Enter the parameters for the selected homing mode. For example, Touchprobe Parameters. |
Homing modes:
oTouchprobe
Refer to PD_PacDriveLib Library Guide, PDL.ST_HomeTp and PDL.ET_HomeTpMode.
NOTE: The parameter i_xRotativeSystem is set in Additional configurations tab.
oInput
Refer to the PD_PacDriveLib Library Guide, PDL.ST_HomeIn and PDL.ET_HomeInMode.
There are two possibilities to use the sensor value PDL.ST_HomeIn.i_xSensor:
oYou can use the property SR_<ConveyorName>.xHomingSensor. Refer to the Explorer tab.
oYou can write a value to the structure in the Logic method.
The property and the structure variable stSensor.i_xSensor are connected with an OR-condition.
oLimit Switch
Refer to PD_PacDriveLib Library Guide, PDL.ST_HomeLimitSwitch and PDL.ET_HomeLimitSwitchMode.
There are two possibilities to use the sensor value AXM.ST_Main.i_xHwLimitPos/ i_xHwLimitNeg:
oYou can use the property SR_<ConveyorName>.xHwLimitSwitchPos/ SR_<ConveyorName>.xHwLimitSwitchNeg. Refer to the Explorer tab.
oYou can write a value to the structure in the Logic method.
The property and the structure variable stMain.i_xHwLimitPos/stMain.i_xHwLimitNeg are connected with an OR-condition.
oTorque
Refer to PD_PacDriveLib Library Guide, PDL.ST_HomeTorque and PDL.ET_HomeTorqueMode.
oMove Position
Refer to PD_PacDriveLib Library Guide, PDL.ST_HomeMoveOnPos.
NOTE: The parameters i_xRotativeSystem and i_lrUserPeriod are set in Additional configurations tab.
oSet Position
Refer to PD_PacDriveLib Library Guide, PDL.ST_HomeSetPos and PDL.ET_HomeSetPosMode.
NOTE: The parameter i_lrUserPeriod is set in Additional configurations tab.
oRestore
Refer to PD_PacDriveLib Library Guide, PDL.ST_HomeSetPos and PDL.ET_HomeSetPosMode.
oWrite Position
Refer to PD_PacDriveLib Library Guide, PDL.ST_HomeWritePos.
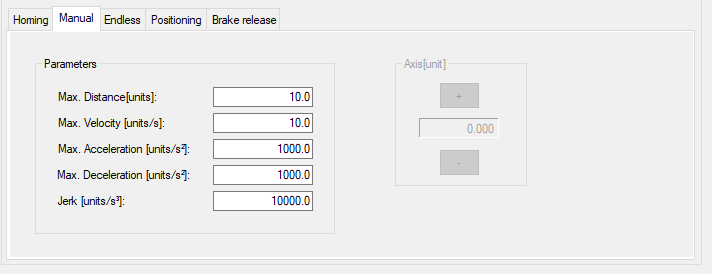
The Manual tab allows you to edit the parameters for the manual mode and helps you to move the axis manually. You can move the axis if the module is online and the manual mode is activated.
For detailed information on the parameters, refer to PD_AxisModule Library Guide, AXM.ST_Manual).
|
|
|
UNINTENDED MOVEMENT OF THE AXIS |
|
oEnsure the proper functioning of the functional safety equipment before commissioning. oEnsure that you can stop axis movements at any time using functional safety equipment (limit switch, emergency stop) before and during commissioning. |
|
Failure to follow these instructions can result in death, serious injury, or equipment damage. |
NOTE: If the conveyor application is offline or the conveyor module is not called within the application, the controls of the Manual tab are disabled.
|
Element |
Description |
|---|---|
|
Parameters |
Edit the parameters for the manual mode: oMax. Distance [units] oMax. Velocity [units/s] oMax. Acceleration [units/s2] oMax. Deceleration [units/s3] oJerk [units/s3] For detailed information on the parameters, refer to PD_AxisModule Library Guide, AXM.ST_Manual). |
|
Axis [unit] |
Click the buttons (positive / negative) to move (jog) along the conveyor axis by controlling the corresponding drives. |
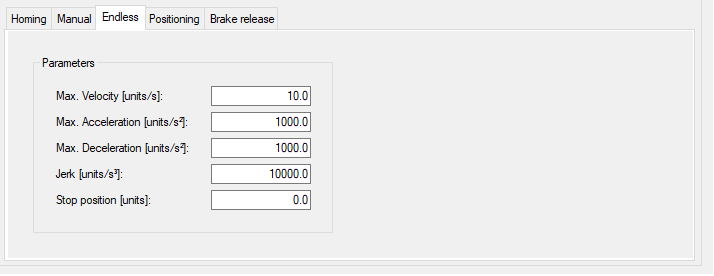
The Endless tab allows you to edit the parameters for the endless mode.
For detailed information on the parameters, refer to PD_AxisModule Library Guide, AXM.ST_EndlessFeed).
|
Element |
Description |
|---|---|
|
Parameters |
Edit the parameters for the endless mode: oMax. Velocity [units/s] oMax. Acceleration [units/s2] oMax. Deceleration [units/s3] oJerk [units/s3] oStop position [units] For detailed information on the parameters, refer to PD_AxisModule Library Guide, AXM.ST_EndlessFeed). |
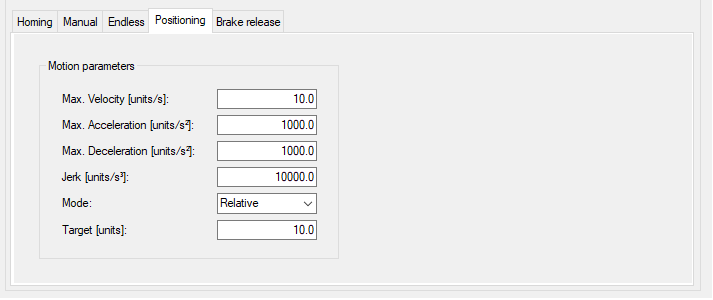
The Positioning tab allows you to edit the parameters for the positioning mode.
For detailed information on the parameters, refer to PD_AxisModule Library Guide, AXM.ST_Positioning).
|
Element |
Description |
|---|---|
|
Motion parameters |
Edit the parameters for the positioning mode: oMax. Velocity [units/s] oMax. Acceleration [units/s2] oMax. Deceleration [units/s3] oJerk [units/s3] oMode oTarget [units] For detailed information on the parameters, refer to PD_AxisModule Library Guide, AXM.ST_Positioning). |
The Brake release tab helps you to release/engage the brake of a conveyor axis.
You can control the brake if the module is online and the brake release mode is activated.
It is not verified whether the motor is equipped with a brake or not.
|
Element |
Description |
|---|---|
|
Axis |
oClick the Release button to release the brake of the respective axis. oClick the Engage button to engage the brake of the respective axis. The indicator between the Release and the Engage button displays the state of the brake. |
