Coupled drives belong to a device that represents the drive within the fieldbus topology. The symbols of these drives have a small mark indicating the corresponding fieldbus type. For example, every standard servo drive is connected to the controller by a fieldbus.
When using drives, CODESYS SoftMotion provides specific device descriptions for the fieldbus master (suffix "_SoftMotion"). These have optimized basic parameters for the drive.
Adding a coupled drive device (EtherCAT)
Requirement: A SoftMotion controller is inserted into the project.
Select the SoftMotion controller in the device tree.
Click Add device from the context menu.
Select the device Fieldbuses ‣ EtherCAT ‣ Master ‣ EtherCATMasterSoftMotion in the dialog Add device.
Click Add device.
⇒ The device is added to the device tree. The dialog Add device remains opened.
Select the device just added to the device tree.
Select a SoftMotion slave (Fieldbuses ‣ EtherCAT ‣ Slave ‣ <SoftMotion drive> ) in the dialog Add device.
Click Add device.
⇒ The device is added to the device tree.
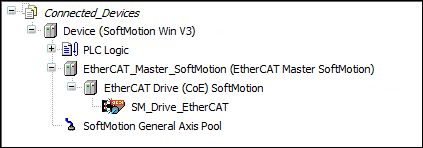
Double-clicking the device opens the corresponding device editor.
See also