The image below shows the possible states for axis groups and the transitions between the states.
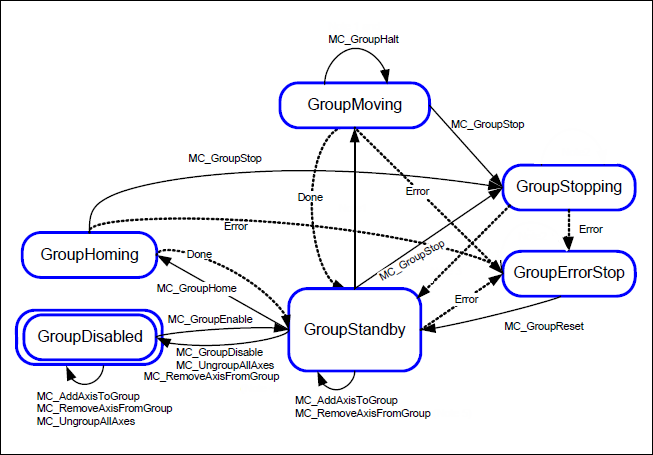
The errors of individual axes always direct the axis group to the GroupErrorStop state.
If the axis group switches to the GroupMoving state, then all axes are switched to the SynchronizedMotion state.
Switching after the GroupStandby or GroupErrorStop state does not switch all axes to standstill or errorstop.
If motion is terminated with an error, then all buffered following motion is aborted with CommandAborted.
The axis group is in the GroupMoving state if and only if the group is moved in a coordinated manner (by one of the motion blocks from Part 4). Switching GroupMoving to GroupStandby is done one cycle after the last position change.
Changes to the dynamic limits and the position limits affect coordinated motion only when the axis group is released the next time (MC_GroupEnable).