MotorTwoSpeeds - Descripción funcional
|
Tipo: |
Bloque de funciones |
|
Disponible desde: |
V2.0.3.0 |
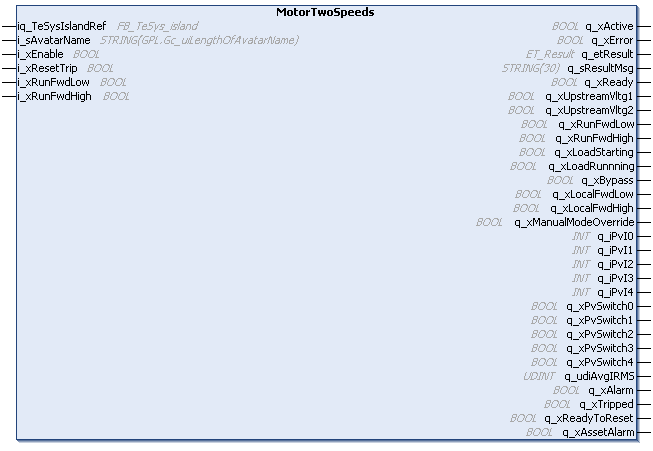
El bloque de funciones MotorTwoSpeeds permite gestionar un motor de dos velocidades.
|
Entrada |
Tipo de datos |
Descripción |
|---|---|---|
|
iq_TeSysIslandRef |
FB_TeSys_island |
Referencia al dispositivo TeSys island. |
|
i_sAvatarName |
Referencia al avatar definido en la configuración de TeSys island. |
|
|
i_xEnable |
BOOL |
Un flanco ascendente en la entrada i_xEnable inicia el intercambio de datos cíclicos entre el bloque de funciones y el avatar seleccionado. Mientras i_xEnable sea TRUE, se intercambiarán los datos cíclicos de cada ciclo de controlador. Un flanco descendente en la entrada i_xEnable detiene el intercambio de datos. Consulte Comportamiento de los bloques de funciones con la entrada i_xEnable. |
|
i_xResetTrip |
BOOL |
Si esta entrada está ajustada en TRUE, se restablecerá el evento de disparo del avatar. |
|
i_xRunFwdLow |
BOOL |
Si esta entrada está ajustada en TRUE, significa que el motor arranca en dirección de avance a baja velocidad. |
|
i_xRunFwdHigh |
BOOL |
Si esta entrada está ajustada en TRUE, significa que el motor arranca en dirección de avance a alta velocidad. |
|
Salida |
Tipo de datos |
Descripción |
|---|---|---|
|
q_xActive |
BOOL |
Si el bloque de funciones está activo, esta salida se establece en TRUE. |
|
q_xError |
BOOL |
Si esta salida se establece en TRUE, se ha detectado un error. Para obtener información detallada, consulte q_etResult y q_etResultMsg. |
|
q_etResult |
Proporciona información de diagnóstico y estado en forma de valor numérico. |
|
|
q_sResultMsg |
STRING[30] |
Proporciona información adicional de diagnóstico y estado en forma de mensaje de texto. |
|
q_xReady |
BOOL |
Indica TRUE si el bloque de funciones está preparado para recibir un comando de ejecución. |
|
q_xUpstreamVltg1 |
BOOL |
Si esta salida está ajustada en TRUE, significa que el avatar ha detectado la presencia de la alimentación principal aguas arriba del primer dispositivo (interruptor automático cerrado). |
|
q_xUpstreamVltg2 |
BOOL |
Si esta salida está ajustada en TRUE, significa que el avatar ha detectado la presencia de la alimentación principal aguas arriba del segundo dispositivo. |
|
q_xRunFwdLow |
BOOL |
Si esta salida está ajustada en TRUE, significa que el motor funciona en modalidad de avance a baja velocidad. |
|
q_xRunFwdHigh |
BOOL |
Si esta salida está ajustada en TRUE, significa que el motor funciona en modalidad de avance a alta velocidad. |
|
q_xLoadStarting |
BOOL |
Si esta salida está ajustada en TRUE, significa que el motor se encuentra en la fase de arranque. |
|
q_xLoadRunning |
BOOL |
Si esta salida está ajustada en TRUE, significa que se ha ejecutado un comando Run o Close y que la corriente fluye por los polos (equivalente a un motor en funcionamiento, pero también para avatares sin motor). (Unidad: mA) |
|
q_xBypass |
BOOL |
Indica el estado del comando de omisión. |
|
q_xLocalFwdLow |
BOOL |
Indica el estado de avance a baja velocidad del comando local. |
|
q_xLocalFwdHigh |
BOOL |
Indica el estado de avance a alta velocidad del comando local. |
|
q_xManualModeOverride |
BOOL |
Indica el estado de anulación de la modalidad manual. |
|
q_iPvI0 |
INT |
Indica la entrada 0 de variables de proceso. |
|
q_iPvI1 |
INT |
Indica la entrada 1 de variables de proceso. |
|
q_iPvI2 |
INT |
Indica la entrada 2 de variables de proceso. |
|
q_iPvI3 |
INT |
Indica la entrada 3 de variables de proceso. |
|
q_iPvI4 |
INT |
Indica la entrada 4 de variables de proceso. |
|
q_xPvSwitch0 |
BOOL |
Indica el conmutador 0 de variables de proceso. |
|
q_xPvSwitch1 |
BOOL |
Indica el conmutador 1 de variables de proceso. |
|
q_xPvSwitch2 |
BOOL |
Indica el conmutador 2 de variables de proceso. |
|
q_xPvSwitch3 |
BOOL |
Indica el conmutador 3 de variables de proceso. |
|
q_xPvSwitch4 |
BOOL |
Indica el conmutador 4 de variables de proceso. |
|
q_udiAvgIRMS |
UDINT |
Indica la corriente media durante la vida útil medida por el dispositivo. (Unidad: mA) |
|
q_xAlarm |
BOOL |
Si esta salida está ajustada en TRUE, significa que el avatar ha detectado un evento de protección. |
|
q_xTripped |
BOOL |
Si esta salida está ajustada en TRUE, significa que el avatar ha detectado un evento de disparo de protección. |
|
q_xReadyToReset |
BOOL |
Si esta salida está ajustada en TRUE, significa que el avatar cumple las condiciones de restablecimiento de disparo y puede restablecerse mediante un comando de restablecimiento de disparo. |
|
q_xAssetAlarm |
BOOL |
Si esta salida está ajustada en TRUE, significa que un dispositivo eléctrico o un módulo de interfaz SIL del avatar han alcanzado o superado el 90 % del número nominal de operaciones (por parámetro del avatar). |