FB_CollisionHandlerSCARA4Ax - UpdateFromJointPositions - (Methode)
Überblick
|
Typ: |
Methode |
|
Verfügbar ab: |
V1.0.0.0 |
Dieses Kapitel enthält Informationen zu folgenden Aspekten:
Aufgabe
Aktualisieren der Position und Ausrichtung der Standard-Kollisionsobjekte des Kollisionshandlers.
Beschreibung
Aktualisieren der Position und Ausrichtung jedes Standard-Kollisionsobjekts auf der Grundlage der als Eingang bereitgestellten Gelenkpositionen. Die Standard-Kollisionsobjekte werden automatisch in der Kollisionseinheit des Kollisionshandlers erstellt und konfiguriert.
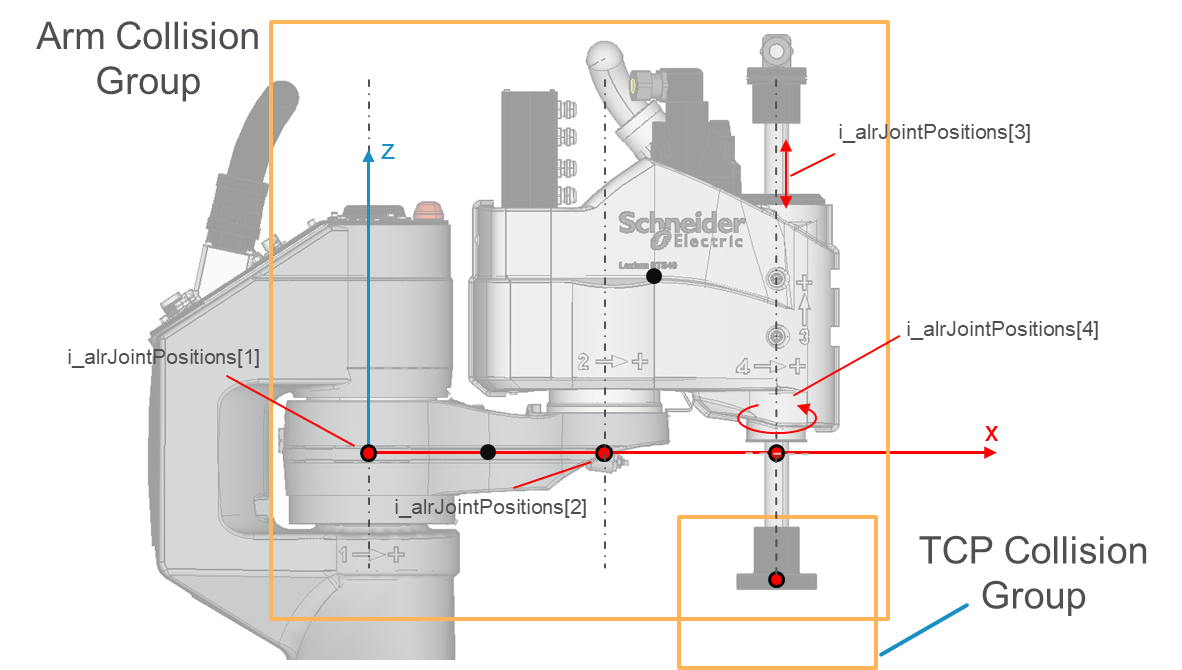
Die folgende Grafik zeigt die Elemente von i_alrJointPositions:
Schnittstelle
Der Funktionsbaustein implementiert die Schnittstelle IF_CollisionHandlerSCARA4Ax.
Zugriff: PUBLIC
|
Eingang |
Datentyp |
Beschreibung |
|---|---|---|
|
i_alrJointPositions |
ARRAY [1...Gc_udiSCARA4AxNumberOfJoints] OF LREAL |
Gelenkpositionen eines SCARA4Ax-Roboters. |
|
Ausgang |
Datentyp |
Beschreibung |
|---|---|---|
|
q_xError |
BOOL |
Der Ausgang wird auf TRUE gesetzt, wenn bei der Ausführung ein Fehler erkannt wurde. |
|
q_etResult |
POU-spezifischer Ausgang der Diagnose. q_xError = FALSE -> Statusmeldung. q_xError = TRUE -> Diagnosemeldung. |
|
|
q_sResultMsg |
STRING(80) |
Ereignisabhängige Meldung, die zusätzliche Informationen über den Diagnosezustand gibt. |
Diagnosemeldungen
|
q_xError |
q_etResult |
Enumerationswert |
Beschreibung |
|---|---|---|---|
|
FALSE |
0 |
Erfolg |
|
|
TRUE |
26 |
Das Objekt ist nicht konfiguriert. |
|
|
TRUE |
37 |
Eine Kollisionsgruppe kann nicht aktualisiert werden. |
|
|
TRUE |
51 |
Eine Kollisionseinheit kann nicht aktualisiert werden. |
|
|
TRUE |
46 |
Das bereitgestellte Kinematikergebnis ist ungültig. |
NotConfigured
|
Enumerationsname: |
NotConfigured |
|
Enumerationswert: |
26 |
|
Beschreibung: |
Das Objekt ist nicht konfiguriert. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Der Kollisionshandler konnte nicht aktualisiert werden. |
Der Kollisionshandler wurde nicht konfiguriert, d. h. xConfigured = FALSE. |
Führen Sie einen erfolgreichen Aufruf von SetParameters durch, bevor Sie diese Methode aufrufen, damit xConfigured = TRUE. |
CollisionGroupUpdateNotPossible
|
Enumerationsname: |
CollisionGroupUpdateNotPossible |
|
Enumerationswert: |
37 |
|
Beschreibung: |
Eine Kollisionsgruppe kann nicht aktualisiert werden. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Der Kollisionshandler konnte nicht aktualisiert werden. |
Mindestens eine der konfigurierten Schnittstellen in der Eigenschaft raifCollisionObjects (in einer der Gruppen der Kollisionseinheit ifCollisionEntity) wurde auf null gesetzt. |
Um diesen Fehler zu beheben, muss die Methode SetParameters erfolgreich aufgerufen werden. |
CollisionEntityUpdateNotPossible
|
Enumerationsname: |
CollisionEntityUpdateNotPossible |
|
Enumerationswert: |
51 |
|
Beschreibung: |
Eine Kollisionseinheit kann nicht aktualisiert werden. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Der Kollisionshandler konnte nicht aktualisiert werden. |
Mindestens eine der konfigurierten Schnittstellen in der Eigenschaft raifCollisionGroups (in der Kollisionseinheit ifCollisionEntity) wurde auf null gesetzt. |
Um diesen Fehler zu beheben, muss die Methode SetParameters erfolgreich aufgerufen werden. |
KinematicResultInvalid
|
Enumerationsname: |
KinematicResultInvalid |
|
Enumerationswert: |
46 |
|
Beschreibung: |
Das bereitgestellte Kinematikergebnis ist ungültig. |
|
Problem |
Ursache |
Lösung |
|---|---|---|
|
Die direkte Kinematik konnte nicht ausgewertet werden. |
i_alrJointPositions enthält eine ungültige Gruppe von Gelenkpositionen. |
Stellen Sie eine gültige Gruppe von Gelenkpositionen bereit. |