FB_OBB – Allgemeine Informationen
Überblick
|
Typ: |
Funktionsbaustein |
|
Verfügbar ab: |
V1.0.0.0 |
|
Übernommen aus: |
- |
|
Implementiert: |
IF_OBB |
|
Erweitert: |
FB_CollisionObject |
|
Versionen: |
Aktuelle Version |
Dieses Kapitel enthält Informationen zu folgenden Aspekten:
Aufgabe
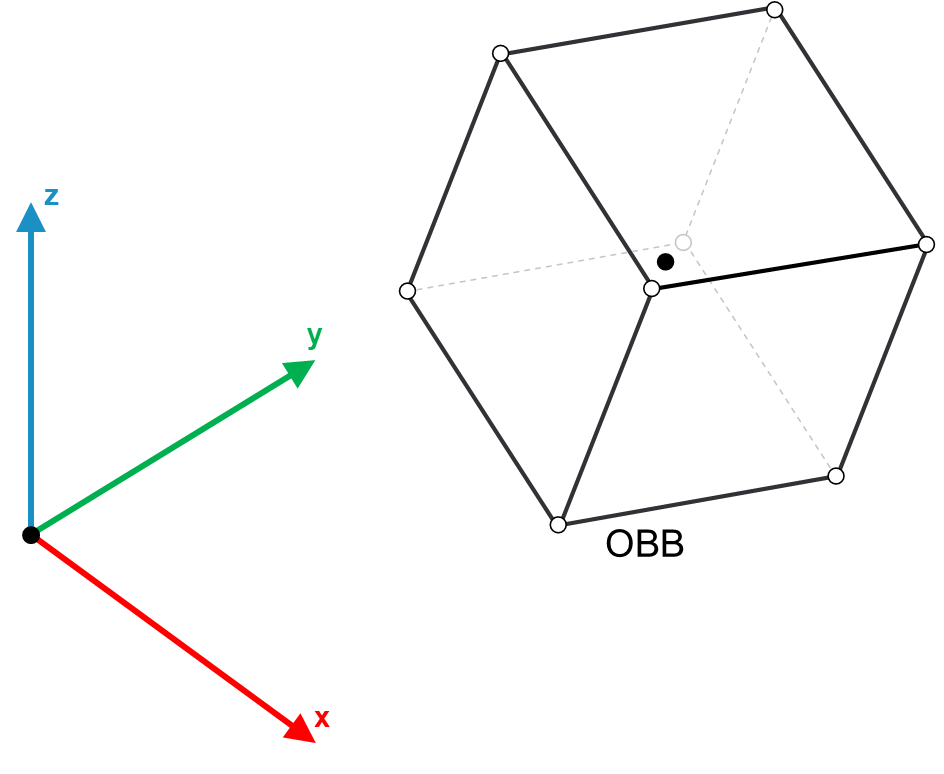
Legt Mittelpunkt, halbe Ausdehnung und Ausrichtung des OBB (Oriented Bounding Box: Beliebig orientierter Quader) fest.
Beschreibung
Ein OBB ist ein Hüllkörper, der durch die Position seines Mittelpunkts, seine halbe Ausdehnung und seine Ausrichtung definiert wird.
Die Abbildung zeigt die Darstellung eines OBB:
Eigenschaften
|
Name |
Datentyp |
Zugriff |
Beschreibung |
|---|---|---|---|
|
rastVertices |
REFERENCE TO ARRAY [1...Gc_udiMaxNumberOfCollisionObjectVertices] OF SE_Math.ST_Vector3D |
Get |
Liste der Eckpunkte des OBB-Objekts. |
|
rstCenter |
REFERENCE TO SE_Math.ST_Vector3D |
Get |
Mittelpunkt des OBB-Objekts. |
|
rstHalfExtents |
REFERENCE TO SE_Math.ST_Vector3D |
Get |
Halbe Ausdehnung des OBB-Objekts entlang X, Y und Z. |
|
udiNumberOfVertices |
UDINT |
Get |
Anzahl der Eckpunkte eines OBB-Objekts. |
|
rstOrientation |
REFERENCE TO SE_Math.ST_Matrix3D |
Get |
Ausrichtung des OBB-Objeks, dargestellt als Rotationsmatrix. |
|
etType |
ET_CollisionObjectType |
Get |
Diese Eigenschaft beschreibt den Typ des vom Objekt implementierten Hüllkörpers. |
|
xConfigured |
BOOL |
Get |
Der Wert dieser Eigenschaft ist TRUE, wenn das Objekt ordnungsgemäß initialisiert wurde. Andernfalls ist der Wert FALSE. |