ST_SCARA4AxKinematicsResult – Allgemeine Informationen
Strukturelemente
|
Name |
Datentyp |
Beschreibung |
|---|---|---|
|
ARRAY [1..Gc_udiSCARA4AxNumberOfJoints] OF LREAL |
Zur Prüfung der Lösung verwendete Gelenkpositionen. |
|
|
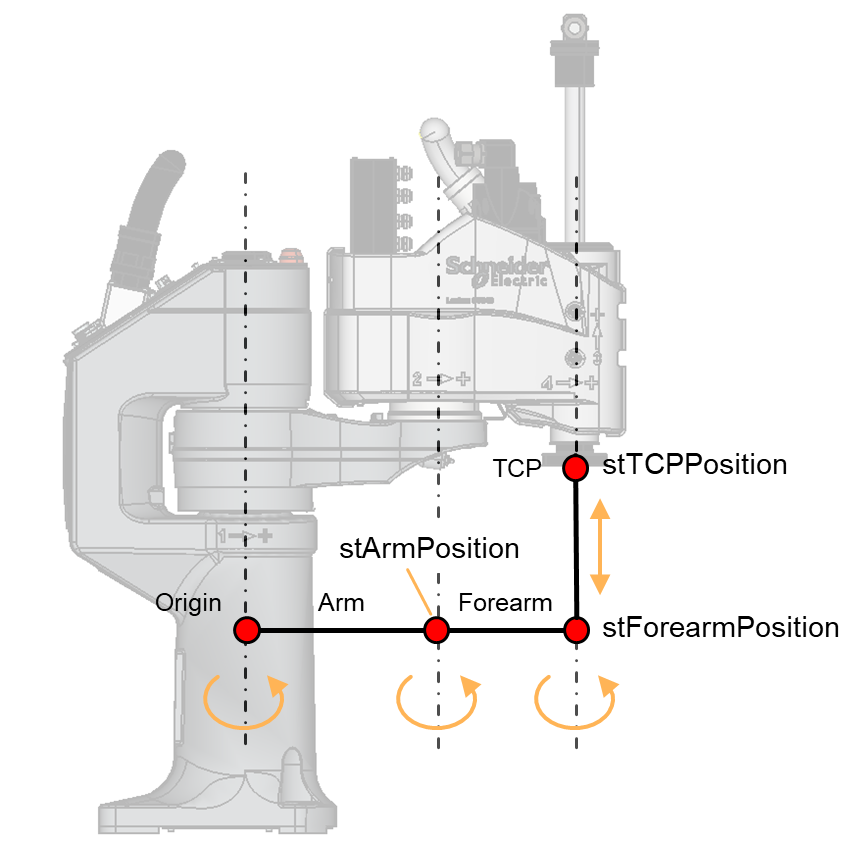
SE_Math.ST_Vector3D |
Position der Armspitze. |
|
|
SE_Math.ST_Vector3D |
Position der Unterarmspitze. |
|
|
SE_Math.ST_Vector3D |
Position des TCP-Moduls. |
|
|
SE_Math.ST_Matrix3D |
Ausrichtung des TCP-Moduls. |
|
|
Konfiguration der Schulter. |
||
|
BOOL |
TRUE bei gültigem Ergebnis, andernfalls FALSE. |