Run-On Motions of the Robot for Risk Analysis
Overview
What is measured is the time from the application of a stop signal to the standstill of the robot. This measurement is carried out for various different loads and velocities (measurement according to ISO 10218-1).
| WARNING | |
|---|---|
If there is a power outage of the control system, the brakes are applied and the robot mechanics leave the planned trajectory.
| WARNING | |
|---|---|
Stop Function Categories
The following table presents the stop function categories according to IEC 60204-1 that are related to the product:
|
Stop function category |
Definition |
Corresponds to |
|---|---|---|
|
0 |
Stopping by immediate removal of power to the machine actuators (for example, an uncontrolled stop). |
An uncontrolled stop (stopping of machine motion by removing electrical power to the machine actuators). |
|
1 |
A controlled stop with power available to the machine actuators to achieve the stop and then removal of power when the stop is achieved. |
An controlled stop (stopping of machine motion with power to the machine actuators maintained during the stopping process). |
Run-On Path Robot VRKT1M0
Run-on path of the robot VRKT1M0 for stop category 0:
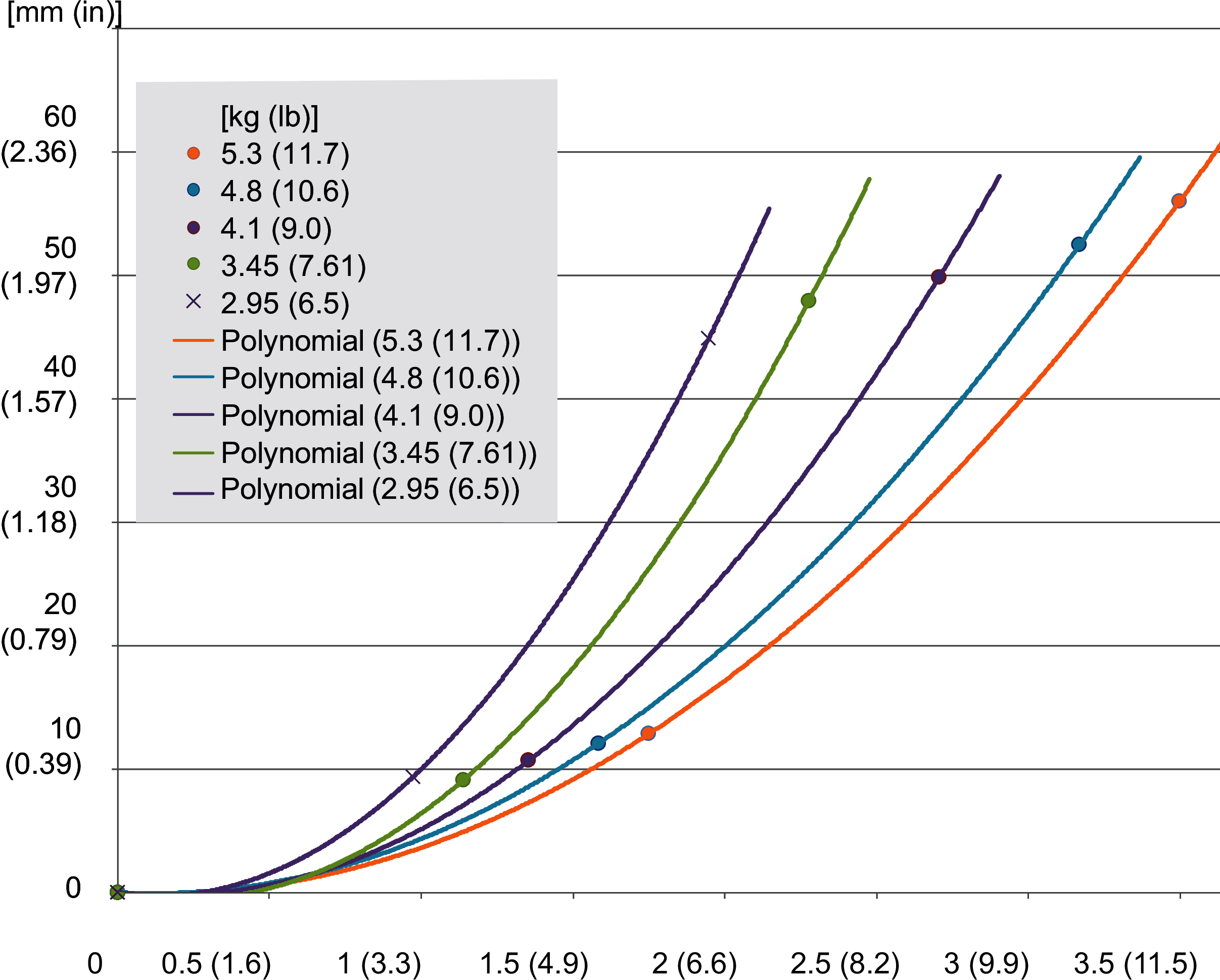
For further information, refer to IEC 60204-1. If necessary, use the holding brake for a stop category 0.
Stopping time of the robot VRKT1M0 for stop category 0:
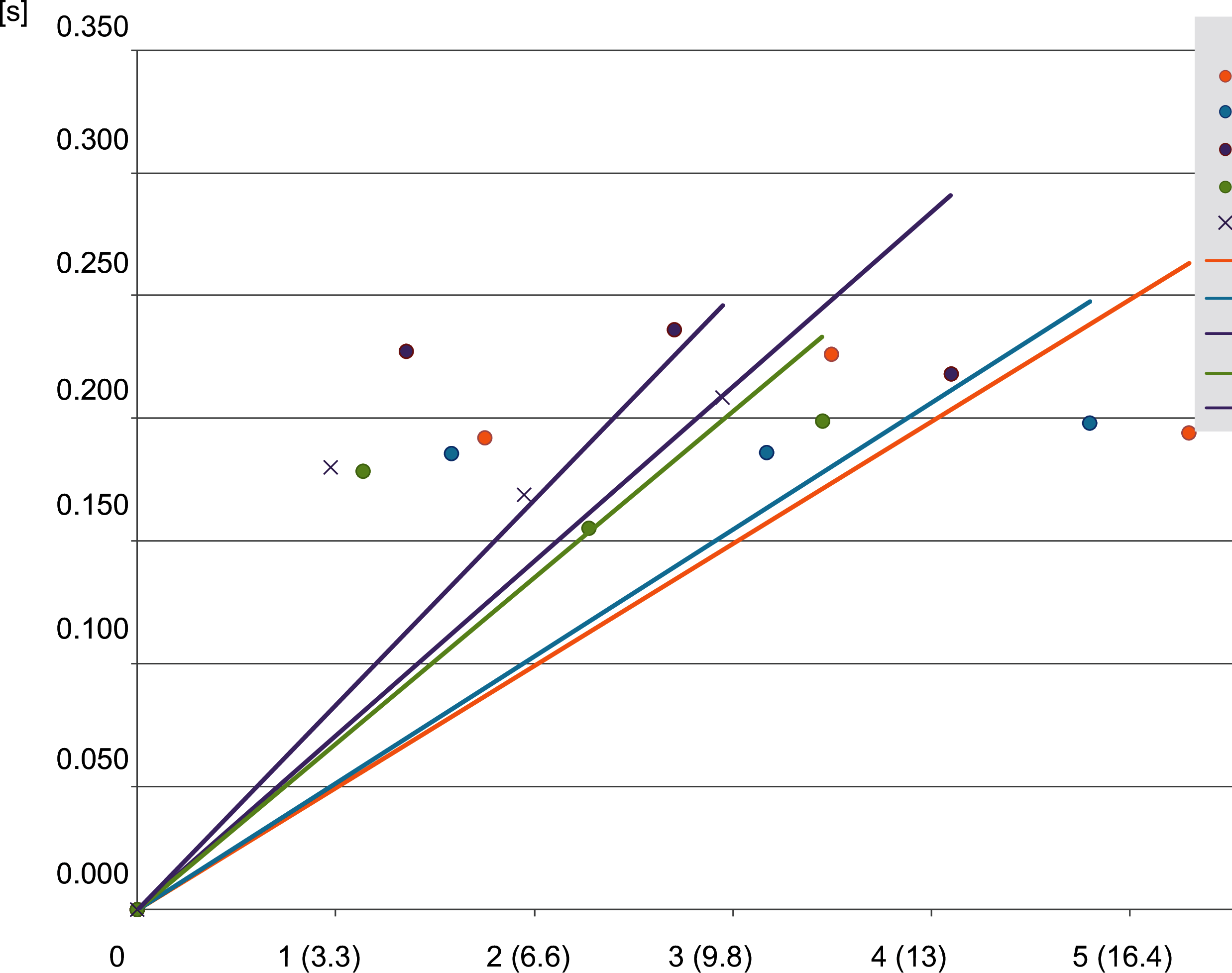
For further information, refer to IEC 60204-1. If necessary, use the holding brake for a stop category 0.
Run-On Path Robot VRKT2M0 and Robot VRKT2L0
Run-on path of the robot VRKT2M0 and the robot VRKT2L0 for stop category 0:
For further information, refer to IEC 60204-1. If necessary, use the holding brake for a stop category 0.
Stopping time of the robot VRKT2M0 and the robot VRKT2L0 for stop category 0:
For further information, refer to IEC 60204-1. If necessary, use the holding brake for a stop category 0.
Run-On Path Robot VRKT2M1
Run-on path of the robot VRKT2M1 for stop category 0:
For further information, refer to IEC 60204-1. If necessary, use the holding brake for a stop category 0.
Stopping time of the robot VRKT2M1 for stop category 0:
For further information, refer to IEC 60204-1. If necessary, use the holding brake for a stop category 0.
Run-On Path Robot VRKT3M0 and Robot VRKT3L0
Run-on path of the robot VRKT3M0 and the robot VRKT3L0 for stop category 0:
For further information, refer to IEC 60204-1. If necessary, use the holding brake for a stop category 0.
Stopping time of the robot VRKT3M0 and the robot VRKT3L0 for stop category 0:
For further information, refer to IEC 60204-1. If necessary, use the holding brake for a stop category 0.
Run-On Path Robot VRKT3M1
Run-on path of the robot VRKT3M1 for stop category 0:
For further information, refer to IEC 60204-1. If necessary, use the holding brake for a stop category 0.
Stopping time of the robot VRKT3M1 for stop category 0:
For further information, refer to IEC 60204-1. If necessary, use the holding brake for a stop category 0.
Run-On Path Robot VRKT5M0 and Robot VRKT5L0
Run-on path of the robot VRKT5M0 and the robot VRKT5L0 for stop category 0:
For further information, refer to IEC 60204-1. If necessary, use the holding brake for a stop category 0.
Stopping time of the robot VRKT5M0 and the robot VRKT5L0 for stop category 0:
For further information, refer to IEC 60204-1. If necessary, use the holding brake for a stop category 0.
Run-On Path Robot VRKT5M1
Run-on path of the robot VRKT5M1 for stop category 0:
For further information, refer to IEC 60204-1. If necessary, use the holding brake for a stop category 0.
Stopping time of the robot VRKT5M1 for stop category 0:
For further information, refer to IEC 60204-1. If necessary, use the holding brake for a stop category 0.