Haltebremse (Option)
Haltebremse
Die Haltebremse im Motor hat die Aufgabe, die Motorposition bei deaktivierter Endstufe zu halten. Die Haltebremse ist keine Sicherheitsfunktion und keine Betriebsbremse.
| WARNUNG | |
|---|---|
Öffnen der Haltebremse
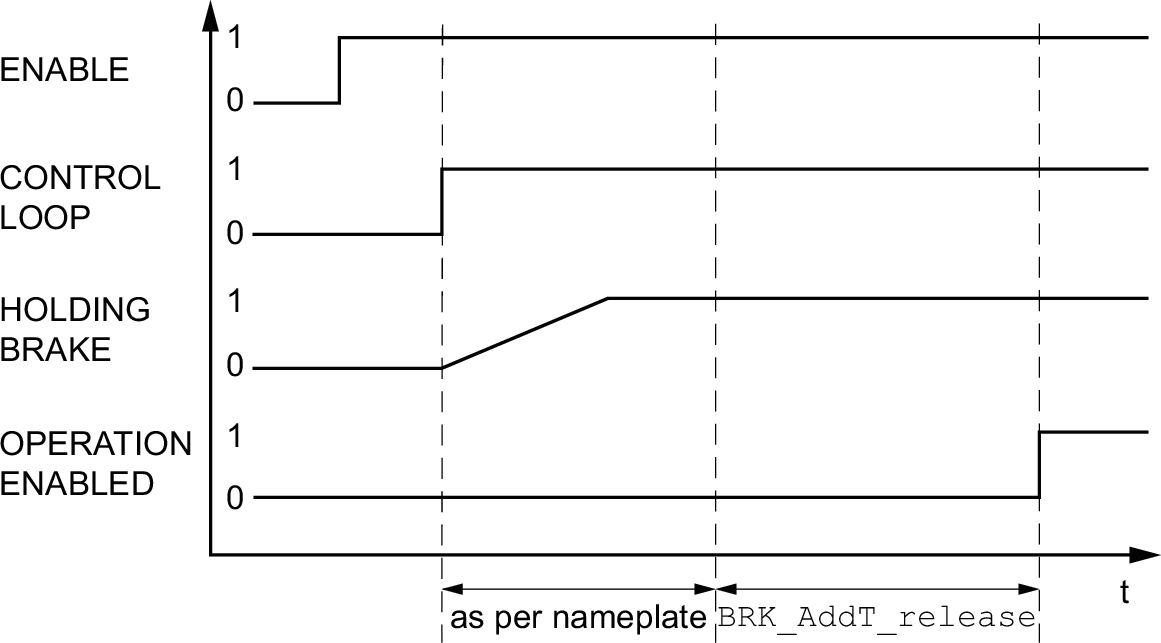
Beim Aktivieren der Endstufe wird der Motor bestromt. Wenn der Motor bestromt ist, wird die Haltebremse automatisch geöffnet.
Das Öffnen der Haltebremse benötigt eine bestimmte Zeit. Diese Zeit ist im elektronischen Typenschild des Motors gespeichert. Erst nach dieser Zeitverzögerung erfolgt der Wechsel in den Betriebszustand 6 Operation Enabled.
Über Parameter kann eine zusätzliche Zeitverzögerung eingestellt werden, siehe Zeitverzögerung beim Öffnen der Haltebremse.
Schließen der Haltebremse
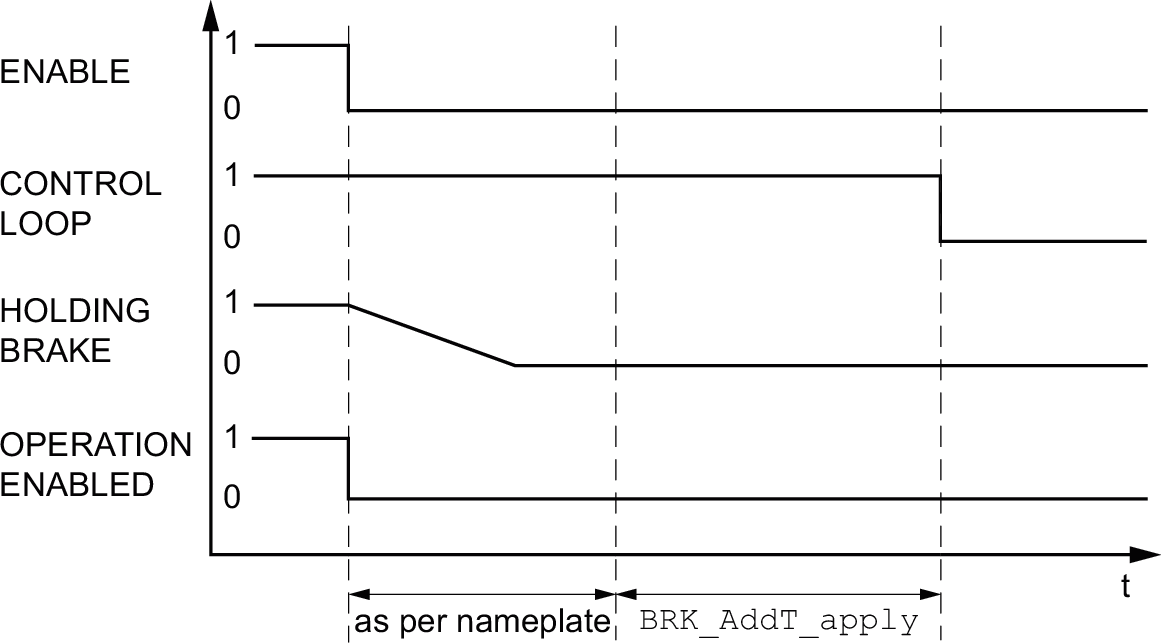
Beim Deaktivieren der Endstufe wird die Haltebremse automatisch geschlossen.
Das Schließen der Haltebremse benötigt jedoch eine bestimmte Zeit. Diese Zeit ist im elektronischen Typenschild des Motors gespeichert. Der Motor bleibt während dieser Zeitverzögerung bestromt.
Weitere Informationen zum Verhalten der Haltebremse, wenn die sicherheitsbezogene Funktion STO ausgelöst wird, finden Sie im Abschnitt Funktionale Sicherheit.
Über Parameter kann eine zusätzliche Zeitverzögerung eingestellt werden, siehe Zeitverzögerung beim Schließen der Haltebremse.
Zusätzliche Zeitverzögerung beim Öffnen der Haltebremse
Eine zusätzliche Zeitverzögerung kann über den Parameter BRK_AddT_release eingestellt werden.
Erst, wenn die gesamte Zeitverzögerung abgelaufen ist, erfolgt der Wechsel in den Betriebszustand 6 Operation Enabled.
|
Parametername HMI-Menü HMI-Name |
Beschreibung |
Einheit Mindestwert Werkseinstellung Höchstwert |
Datentyp R/W Persistente Variablen Expert |
Parameteradresse über Feldbus |
|---|---|---|---|---|
|
Zusätzliche Zeitverzögerung beim Öffnen der Haltebremse. Die Gesamt-Zeitverzögerung beim Öffnen der Haltebremse entspricht der Zeitverzögerung aus dem elektronischen Typenschild des Motors und der zusätzlichen Zeitverzögerung aus diesem Parameter. Typ: Dezimalwert mit Vorzeichen – 2 Byte Schreibzugriff über Sercos: CP2, CP3, CP4 Eine Änderung der Einstellung ist nur bei deaktivierter Endstufe möglich. Geänderte Einstellungen werden beim nächsten Aktivieren der Endstufe übernommen. |
ms 0 0 400 |
INT16 R/W per. - |
Modbus 1294 IDN P-0-3005.0.7 |
Zusätzliche Zeitverzögerung beim Schließen der Haltebremse
Eine zusätzliche Zeitverzögerung kann über den Parameter BRK_AddT_apply eingestellt werden.
Der Motor bleibt bestromt, bis die gesamte Zeitverzögerung abgelaufen ist.
|
Parametername HMI-Menü HMI-Name |
Beschreibung |
Einheit Mindestwert Werkseinstellung Höchstwert |
Datentyp R/W Persistente Variablen Expert |
Parameteradresse über Feldbus |
|---|---|---|---|---|
|
Zusätzliche Zeitverzögerung beim Schließen der Haltebremse. Die Gesamt-Zeitverzögerung beim Schließen der Haltebremse entspricht der Zeitverzögerung aus dem elektronischen Typenschild des Motors und der zusätzlichen Zeitverzögerung aus diesem Parameter. Typ: Dezimalwert mit Vorzeichen – 2 Byte Schreibzugriff über Sercos: CP2, CP3, CP4 Eine Änderung der Einstellung ist nur bei deaktivierter Endstufe möglich. Geänderte Einstellungen werden beim nächsten Aktivieren der Endstufe übernommen. |
ms 0 0 1000 |
INT16 R/W per. - |
Modbus 1296 IDN P-0-3005.0.8 |
Haltebremse auf Funktion überprüfen
Das Gerät befindet sich im Betriebszustand 4 Ready To Switch On.
|
Schritt |
Aktion |
|---|---|
|
1 |
Wechseln Sie in die Betriebsart Jog (HMI: (op)→(JOg)→(JGST)). Die Endstufe wird aktiviert und die Haltebremse geöffnet. Auf dem HMI wird (JG-) angezeigt. |
|
2 |
Wenn die Haltebremse sich geöffnet hat, drücken und halten Sie die Navigationstaste. Drücken Sie anschließend die Taste ESC. Solange die Navigationstaste gedrückt ist, führt der Motor eine Bewegung aus. Beim Drücken der Taste ESC wird die Haltebremse wieder geschlossen und die Endstufe wird deaktiviert. |
|
3 |
Wenn die Haltebremse sich nicht geöffnet hat, drücken Sie die Taste ESC. Beim Drücken der Taste ESC wird die Endstufe deaktiviert. |
|
4 |
Wenn die Haltebremse sich nicht korrekt verhält, überprüfen Sie die Verdrahtung. |
Manuelles Öffnen der Haltebremse
Für die mechanische Justage kann es notwendig sein, die Motorposition von Hand zu verdrehen oder zu verschieben.
Das manuelle Lüften der Haltebremse ist nur in den Betriebszuständen 3 Switch On Disabled, 4 Ready To Switch On oder 9 Fault möglich.
Beim ersten Betrieb des Geräts besteht ein erhöhtes Risiko unerwarteter Bewegungen, zum Beispiel durch falsche Verdrahtung oder ungeeignete Parametereinstellungen. Ein Öffnen der Haltebremse kann eine unbeabsichtigte Bewegung hervorrufen, zum Beispiel ein Absacken der Last bei Vertikalachsen.
| WARNUNG | |
|---|---|
Manuelles Schließen der Haltebremse
Zum Testen der Haltebremse kann es notwendig sein, die Haltebremse manuell zu schließen.
Das manuelle Schließen der Haltebremse ist nur bei Motorstillstand möglich.
Wenn bei einer manuell geschlossenen Haltebremse die Endstufe aktiviert wird, bleibt die Haltebremse geschlossen.
Das manuelle Schließen der Haltebremse hat Vorrang gegenüber dem automatischen und dem manuellen Öffnen der Haltebremse.
Wenn bei einer manuell geschlossenen Haltebremse eine Bewegung gestartet wird, kann dies zu Verschleiß führen.
| HINWEIS | |
|---|---|
Mit Firmware-Version ≥V01.04 kann die Haltebremse manuell geschlossen werden.
Manuelles Öffnen der Haltebremse über einen Signaleingang
Um die Haltebremse über einen Signaleingang manuell öffnen zu können, muss die Signaleingangsfunktion „Release Holding Brake“ parametriert sein, siehe Digitale Signaleingänge und -ausgänge.
Manuelles Öffnen und Schließen der Haltebremse über den Feldbus
Mit dem Parameter BRK_release kann die Haltebremse über den Feldbus manuell gelüftet werden.
|
Parametername HMI-Menü HMI-Name |
Beschreibung |
Einheit Mindestwert Werkseinstellung Höchstwert |
Datentyp R/W Persistente Variablen Expert |
Parameteradresse über Feldbus |
|---|---|---|---|---|
|
Manueller Betrieb der Haltebremse. 0 / Automatic: Automatische Bearbeitung 1 / Manual Release: Manuelles Öffnen der Haltebremse 2 / Manual Application: Manuelles Schließen der Haltebremse Die Haltebremse kann manuell geöffnet oder geschlossen werden. Die Haltebremse kann nur in den Betriebszuständen 'Switch On Disabled', 'Ready To Switch On' oder 'Fault' manuell geöffnet oder geschlossen werden. Wenn Sie die Haltebremse manuell geschlossen haben und sie dann manuell öffnen möchten, müssen Sie diesen Parameter erst auf 'Automatic' und dann auf 'Manual Release' setzen. Typ: Dezimalwert ohne Vorzeichen – 2 Byte Schreibzugriff über Sercos: CP2, CP3, CP4 Geänderte Einstellungen werden sofort übernommen. |
- 0 0 2 |
UINT16 R/W - - |
Modbus 2068 IDN P-0-3008.0.10 |