Verhalten der Feedback-Eigenschaft IF_RobotFeedbackConnectionPath.etActiveMotionLimit
Allgemeines
Die Roboter-Rückmeldung etActiveMotionLimit ist vom Typ ET_RobotComponent.
Verwendete Werte von ET_RobotComponent für dieses Beispiel
| Parameter | Wert |
|---|---|
| ET_RobotComponent.Path | 20 |
| ET_RobotComponent.Space | 30 |
| ET_RobotComponent.AuxAx1 | 101 |
-
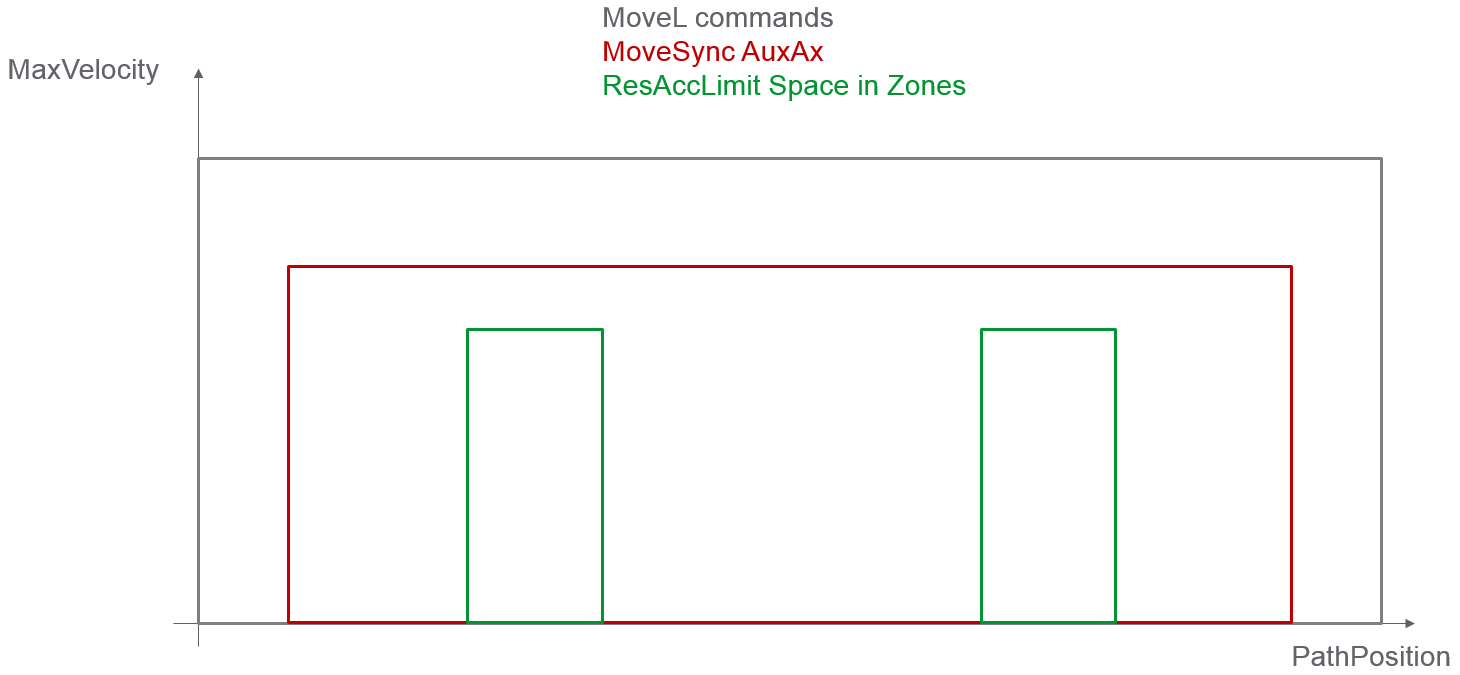
Der Wert MaxAccelerationResultant für die Roboterkomponente „Space“ ist auf 1000,0 eingestellt.
-
Der Wert MaxVelocity für die Roboterkomponente „Path“ ist auf 200,0 eingestellt.
-
Die Werte MaxAcceleration und MaxDeceleration für die Roboterkomponente „Path“ sind auf 1000,0 eingestellt.
-
Die Rampe für die Roboterkomponente „Path“ ist auf 100,0 eingestellt.
-
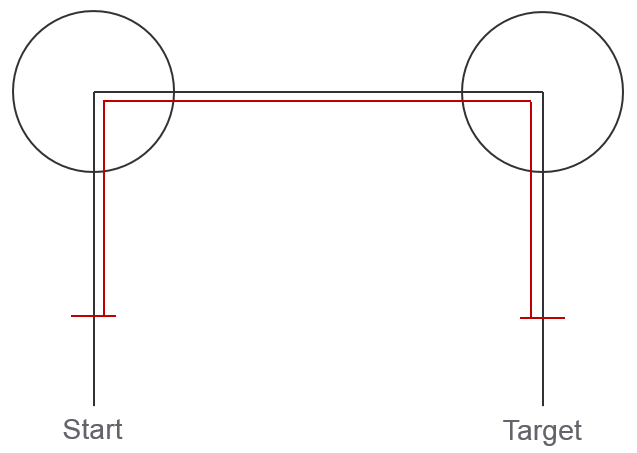
Eine Roboterbewegung besteht aus drei MoveL, die in der Absetzung einer verbundenen Bahn resultieren.
Start = (-100,0 / 0,0 / 0,0) → (-100,0 / 100,0 / 0,0) → (100,0 / 100,0 / 0,0) → (100,0 / 0,0 / 0,0) = Ziel.
-
Der Wert MaxZone ist auf 25,0 gesetzt.
-
Eine synchrone Hilfsachsenbewegung (MoveSync), die in der ersten beginnt und in der dritten MoveL endet, wird abgesetzt.
-
Der Wert MaxVelocity für die Roboterkomponente AuxAx1 ist auf 100,0 eingestellt.
-
Die Werte MaxAcceleration und MaxDeceleration für die Roboterkomponente „Path“ sind auf 1000,0 eingestellt.
Die berechnete MaxVelocity vom MoveSync für die Roboterkomponente „Path“, um die Bewegungsparameter für die synchrone Hilfsachsenbewegung innerhalb der Grenzen zu halten, ist kleiner als die konfigurierte MaxVelocity für die Roboterkomponente „Path“.
Die Bahnbewegung wird von MaxAccelerationResultant für die Roboterkomponente „Space“ in den Bereichen entlang der verbundenen Bahn begrenzt.
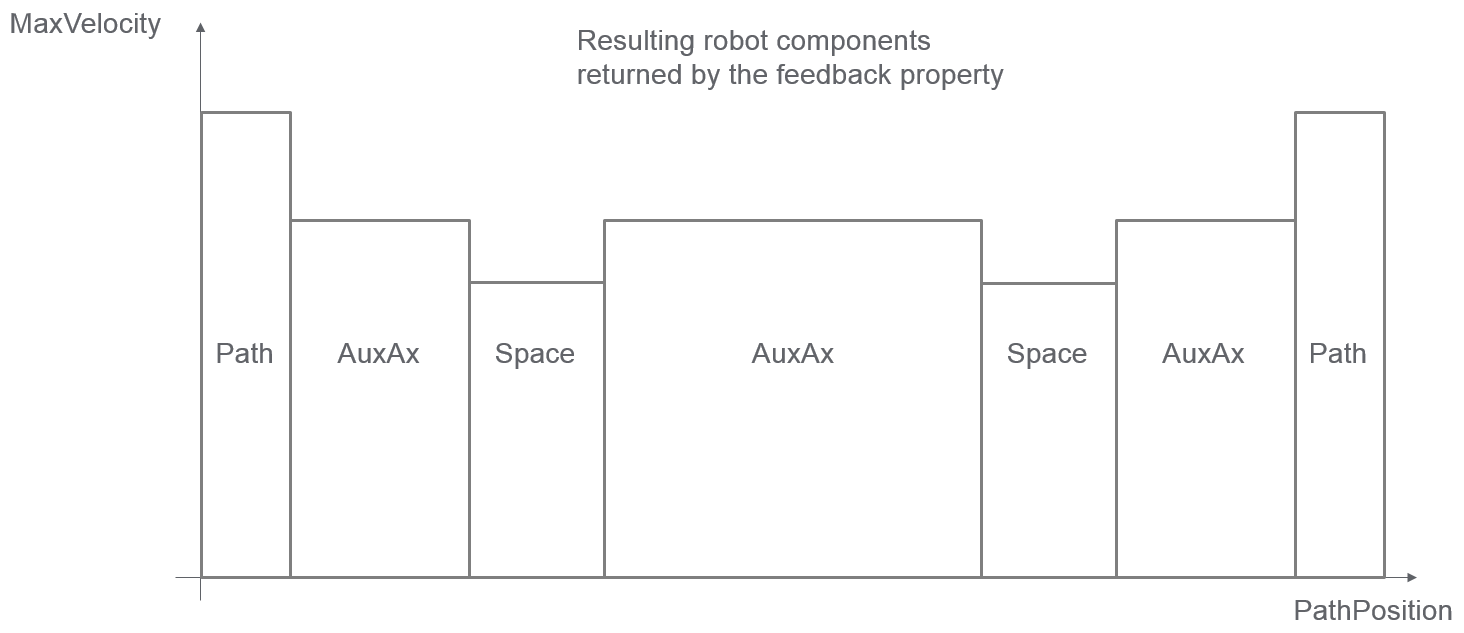
Begrenzung der Roboterbewegung
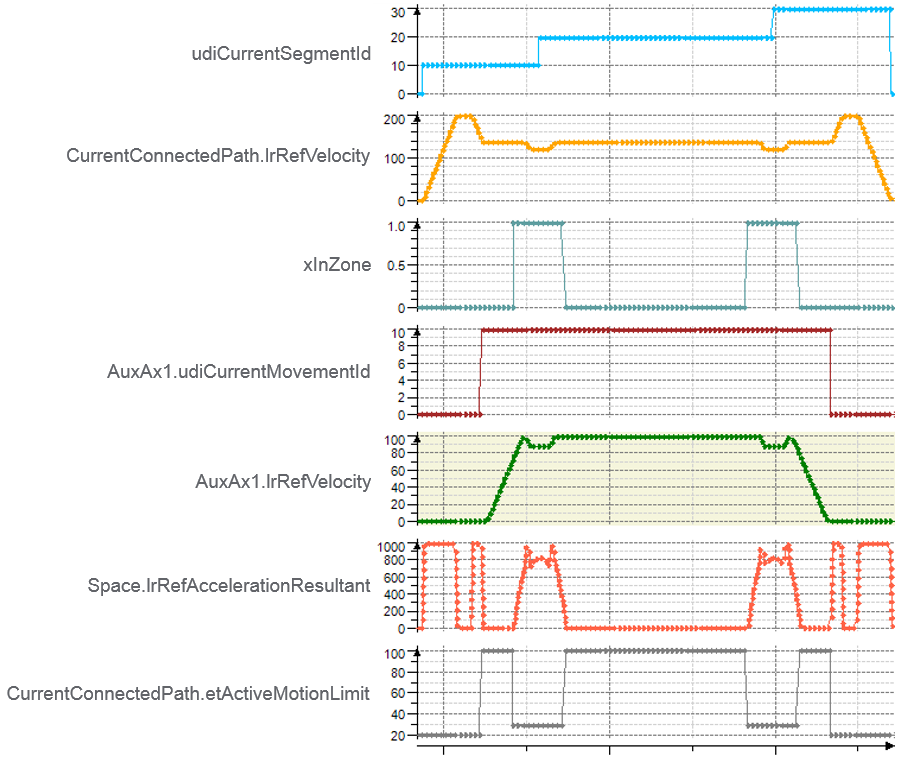
Der Trace kann ausgelesen werden, um festzustellen, welche Roboterkomponente die Roboterbewegung am meisten begrenzt:
| Trace-Werte | ActiveMotionLimit |
|---|---|
|
Am Anfang (CurrentSgmentId = 10) und Ende (CurrentSegmentId = 30) der Bewegung wird der Wert 20 im Trace als ActiveMotionLimit gezeigt |
Die Benutzer-Bewegungsparameter werden verwendet, um die Bewegung des Roboters durchzuführen, die mithilfe der Fahrbefehle SegmentId 10 und 30 erteilt werden. |
|
Wenn AuxAx1.udiCurrentMovementId 10 wird, wird der Wert 101 im Trace als ActiveMotionLimit angezeigt |
Die Bewegung des Roboters wird von der synchronen Bewegung der Hilfsachse begrenzt, die vom Befehl MoveSync mit MovementId 10 erteilt wird. |
|
Wenn xInZone TRUE ist, wird der Wert 30 im Trace als AcitveMotionLimit angezeigt |
Die Bewegung des Roboters wird von der Begrenzung der resultierenden Beschleunigung im Raum begrenzt. |