Änderung des Koordinatensystems während des Betriebs
Allgemeines
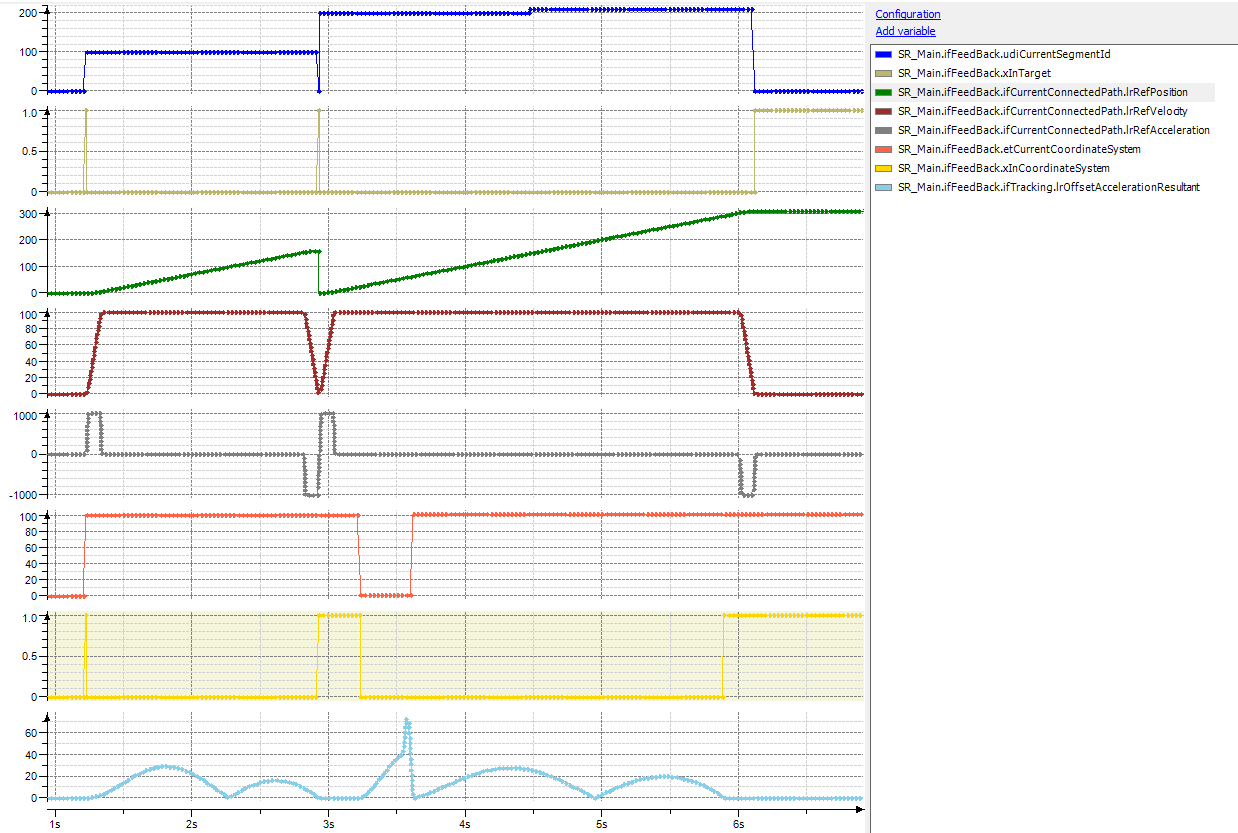
Das Tracking kann während des Betriebs geändert werden. Dies kann beispielsweise erforderlich sein, wenn der Roboter sich auf dem Weg in eine Warteposition befindet, während ein neues Umsetzziel erscheint.
Beispielcode (gekürzt):
SetCoordinateSystem (CSR);
MoveS(Target := WaitPosition, ID : = 10, MaxZone := 10);
ChangeCoordinateSystem2(StartId := 10, StartOffset := 20, EndId := 10, EndOffset := 0);
[Target appears]
SetCoordinateSystem(Tracking1);
ChangeCoordinateSystem2(StartID := 10, StartOffset := 25, EndId := 20, EndOffset := -10);
MoveS(Target := Pick, Id := 20);Wenn das erste Tracking aktiviert ist, wenn das zweite Tracking ausgelöst wird, dann wird das erste Tracking abgebrochen. Das erste Tracking wird mit der konfigurierten maximalen resultierenden Beschleunigung für das Tracking gestoppt, bevor das zweite Tracking gestartet wird. Die zweite Synchronphase verwendet wenn möglich eine reduzierte resultierende Beschleunigung für das Tracking.
Zu berücksichtigende Bedingungen
Zwei Bedingungen müssen berücksichtigt werden:
-
Die Startposition des zweiten Trackings muss größer als die aktuelle Bahnposition sein. Andernfalls wird die Diagnosemeldung PathPositionStartAlreadyPassed angezeigt.
-
Die Startposition des zweiten Trackings muss größer als die Startposition des ersten Trackings sein. Ist sie kleiner, wird die Diagnosemeldung PathPositionStartInvalid angezeigt.
Wenn die Startposition des zweiten Trackings jedoch vor der ersten liegt, wird diese zuerst ausgelöst und durch das erste Tracking abgebrochen.