Verwendung von ModifyCoordinateSystem / ModifyCoordinateSystem2
Roboterkoordinatensystem
Das Roboterkoordinatensystem (ET_CoordinateSystem.CSR) basiert auf dem mechanischen Koordinatensystem (ET_CoordinateSystem.Mechanic) eines Roboters.
Standardmäßig ist das Roboterkoordinatensystem kongruent zum mechanischen Koordinatensystem.
Offsets und Orientierungen beziehen sich auf das mechanische Koordinatensystem, wenn die ModifyCoordinateSystem- oder die ModifyCoordinateSystem2-Methode für das Roboterkoordinatensystem aufgerufen wird.
Siehe auch IF_RobotConfigurationAdvanced - ModifyCoordinateSystem (Methode) und IF_RobotConfigurationAdvanced - ModifyCoordinateSystem2 (Methode).
ModifyCoordinateSystem2(
i_etName := ROB.ET_CoordinateSystem.CSR,
i_stOffset := stOffset,
i_etOrientationConvention := ET_OrientationConvention.ZYX,
i_stOrientation := stOrientation,
… );Wenn ein Schneider Electric Lexium-Roboter konfiguriert ist, wird das Roboterkoordinatensystem standardmäßig in Z-Richtung geändert. Der Wert des geänderten Roboterkoordinatensystems kann durch Aufruf der Methode GetCoordinateSystem gelesen werden.
Tracking-Koordinatensystem
Tracking-Koordinatensysteme (ET_CoordinatSystem.Tracking1...30) basieren auf dem Roboterkoordinatensystem (ET_CoordinateSystem.CSR).
Offsets und Orientierungen beziehen sich in folgenden Fällen auf das Roboterkoordinatensystem:
-
Dem Roboter wird ein Trackingsystem oder eine Trackingquelle hinzugefügt.
Add<Type>TrackingSystem<Version>( i_etSystemId := ROB.ET_CoordinateSystem.Tracking1, i_stOffset := stOffset, i_etOrientationConvention := ET_OrientationConvention.ZYX, i_stOrientation := stOrientation, … ); -
Die Methode ModifyCoordinateSystem oder die Methode ModifyCoordinateSystem2 wird für ein Tracking-Koordinatensystem aufgerufen.
ModifyCoordinateSystem2( i_etName := ROB.ET_CoordinateSystem.Tracking1, i_stOffset := stOffset, i_etOrientationConvention := ET_OrientationConvention.ZYX, i_stOrientation := stOrientation, … );
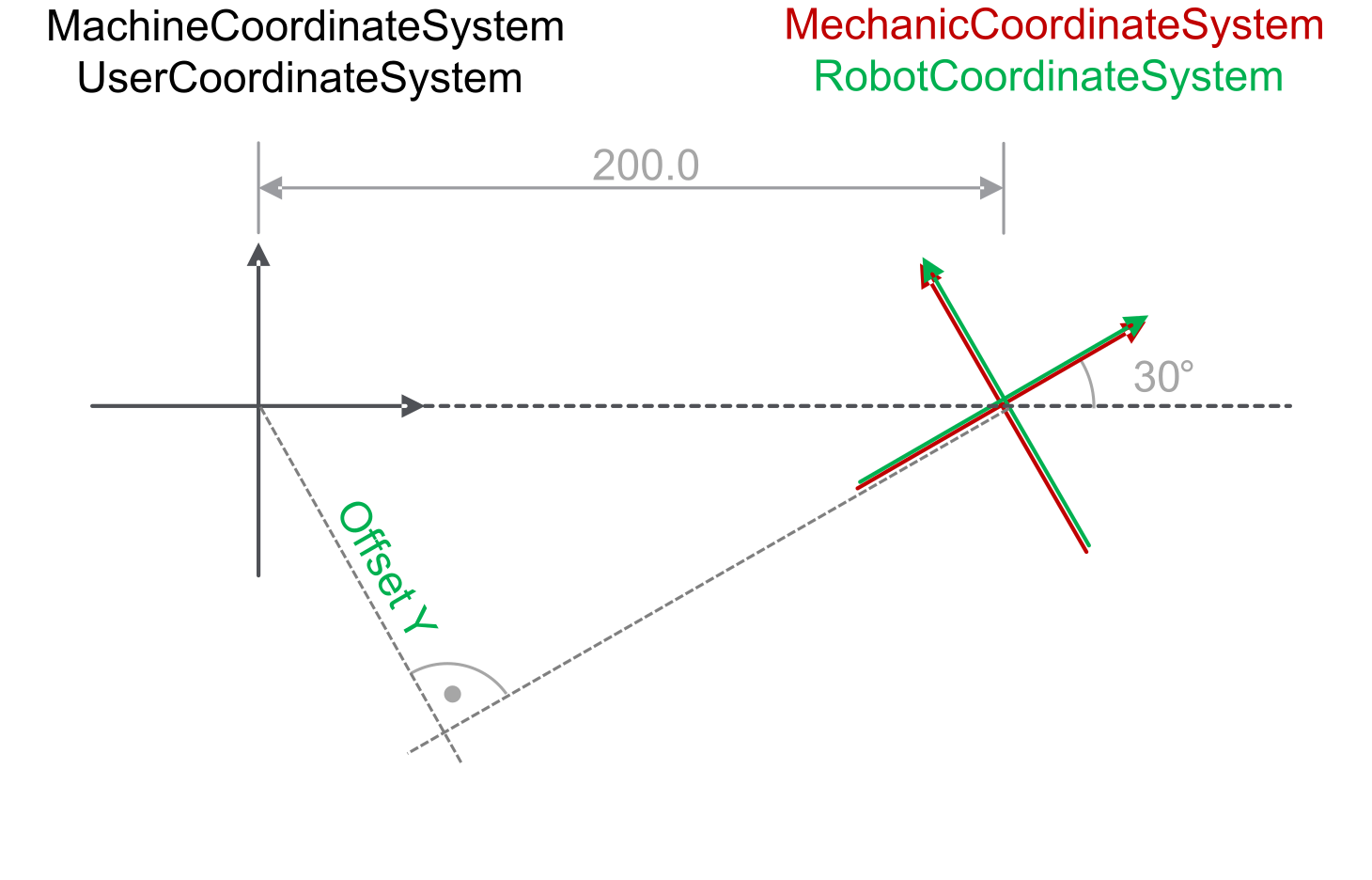
Beispiel - Roboterkoordinatensystem
Das Roboterkoordinatensystem:
-
Ist standardmäßig kongruent zum mechanischen Koordinatensystem.
-
Befindet sich 200,0 mm in positiver X-Richtung des Maschinen-/Benutzer-Koordinatensystems.
-
Wird um 30° in Bezug auf das Maschinen-/Benutzerkoordinatensystem gedreht.
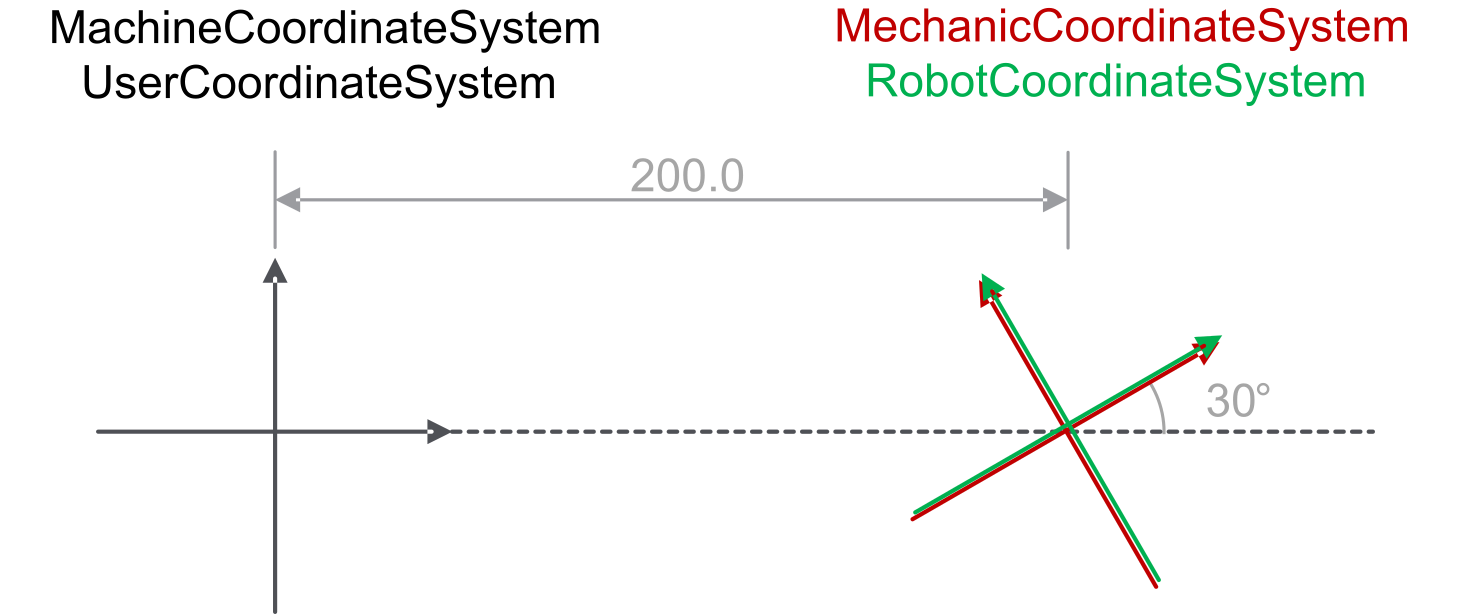
Ziel ist die Parametrierung des Roboterkoordinatensystems kongruent zum Maschinen-/Benutzerkoordinatensystem.
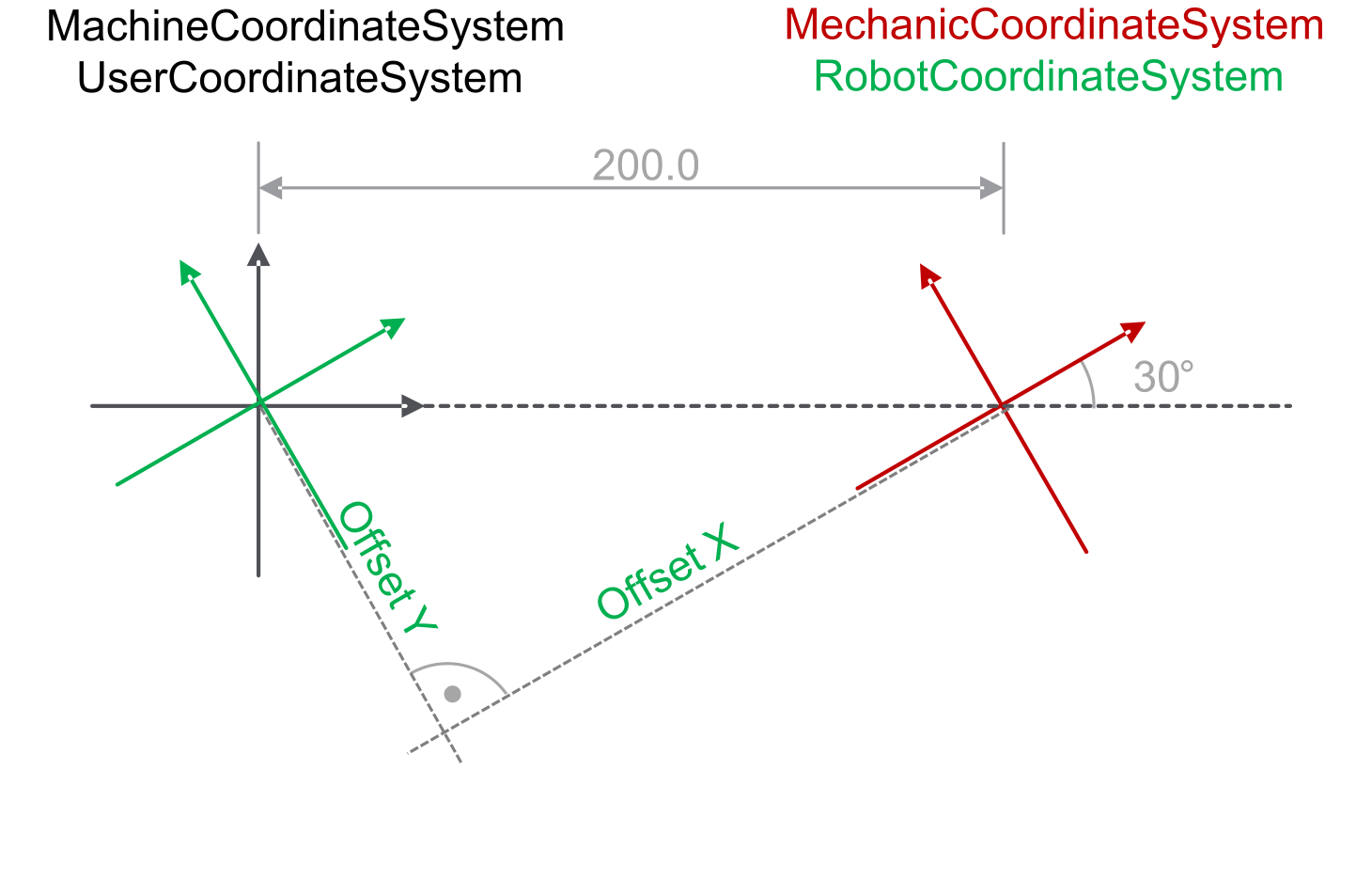
Berechnung des Offsets für das Roboterkoordinatensystem in X-Richtung des mechanischen Koordinatensystems:
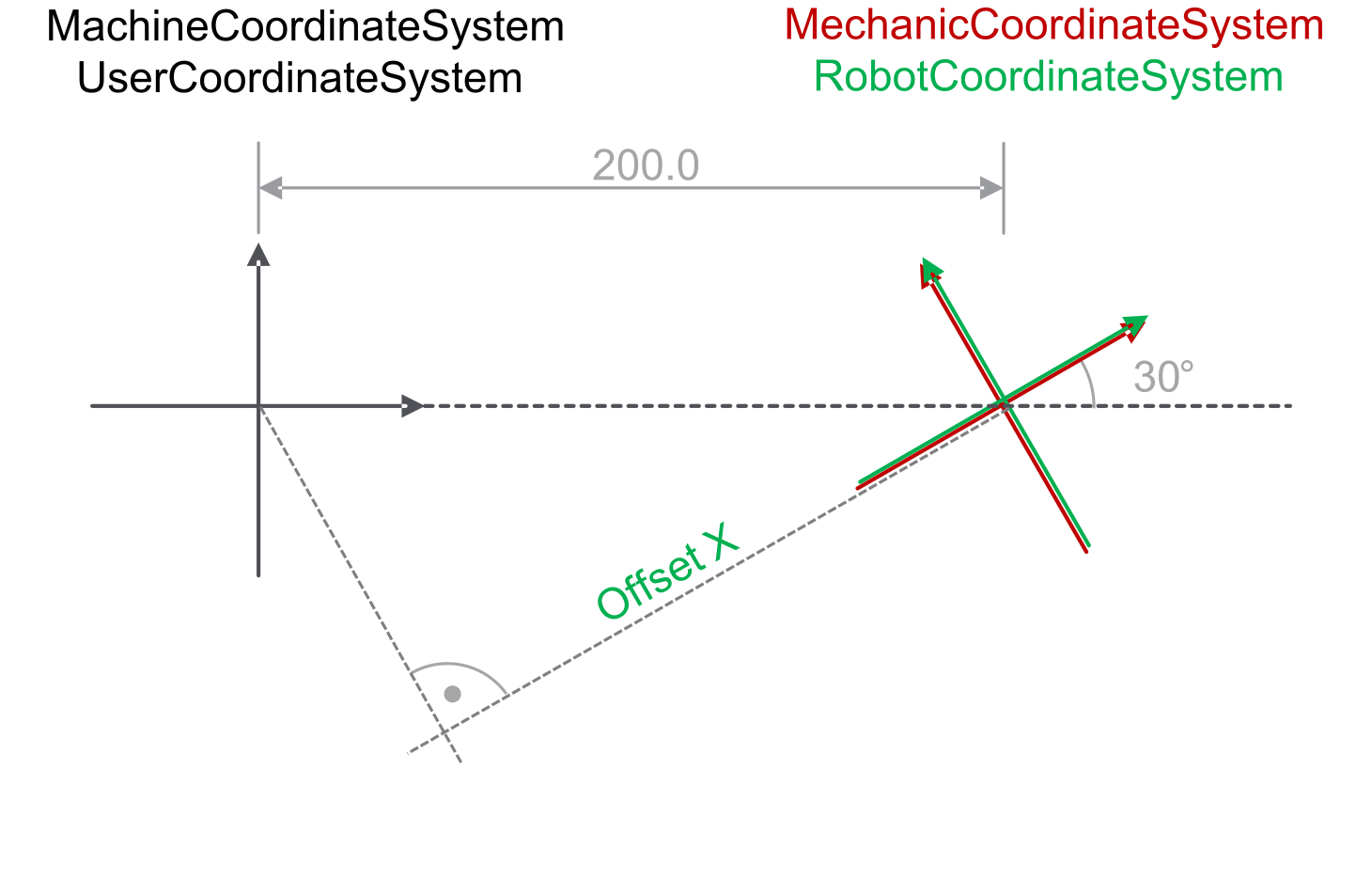
Offset X = - COS (30) * 200,0 = -173,21
Ergebnis:
Offset X = -173,21
Berechnung des Offsets für das Roboterkoordinatensystem in Y-Richtung des mechanischen Koordinatensystems:
Offset Y = SIN (30) * 200,0 = 100,0
Ergebnis:
-
Offset X = -173,21
-
Offset Y = 100,0
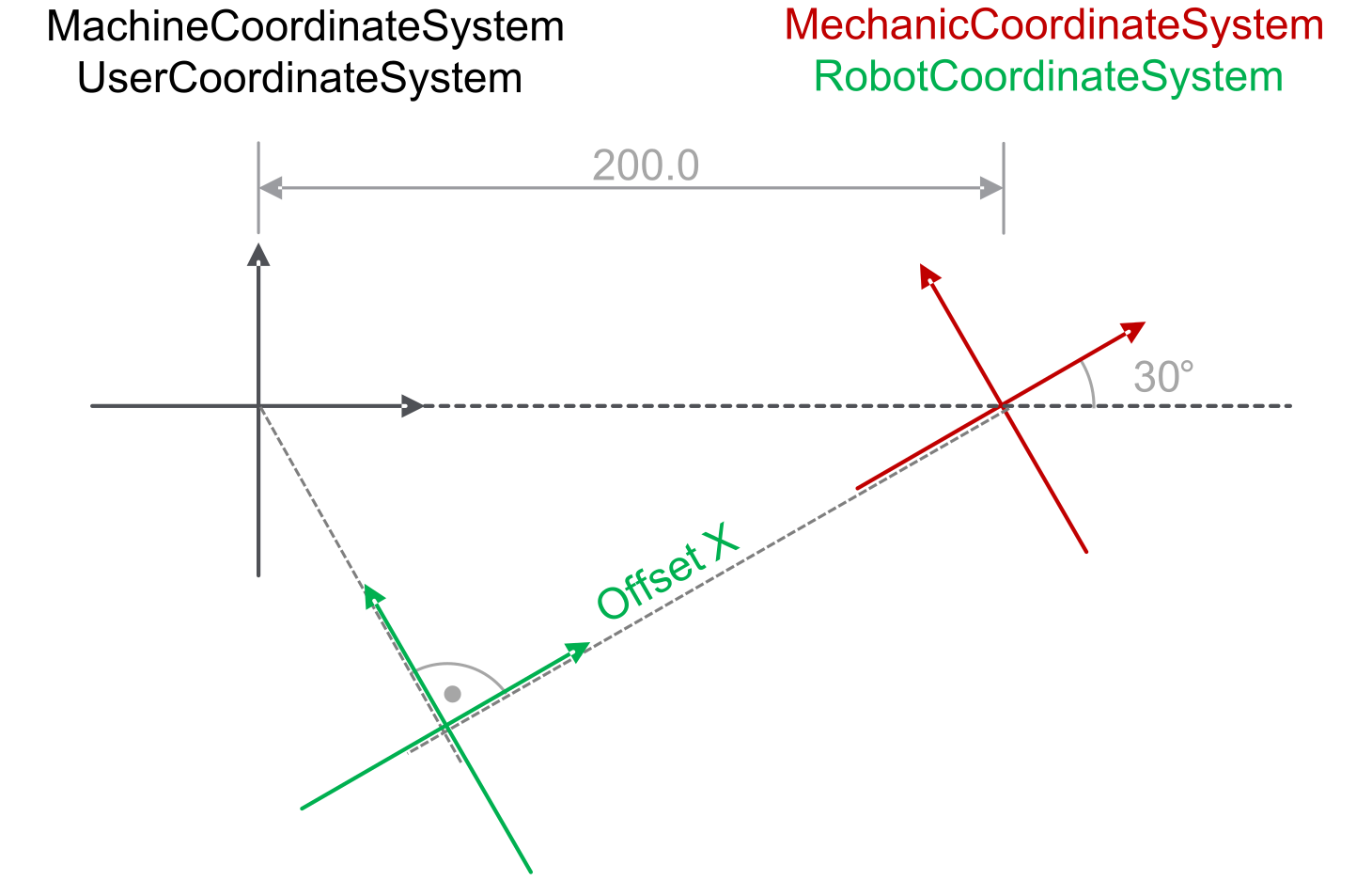
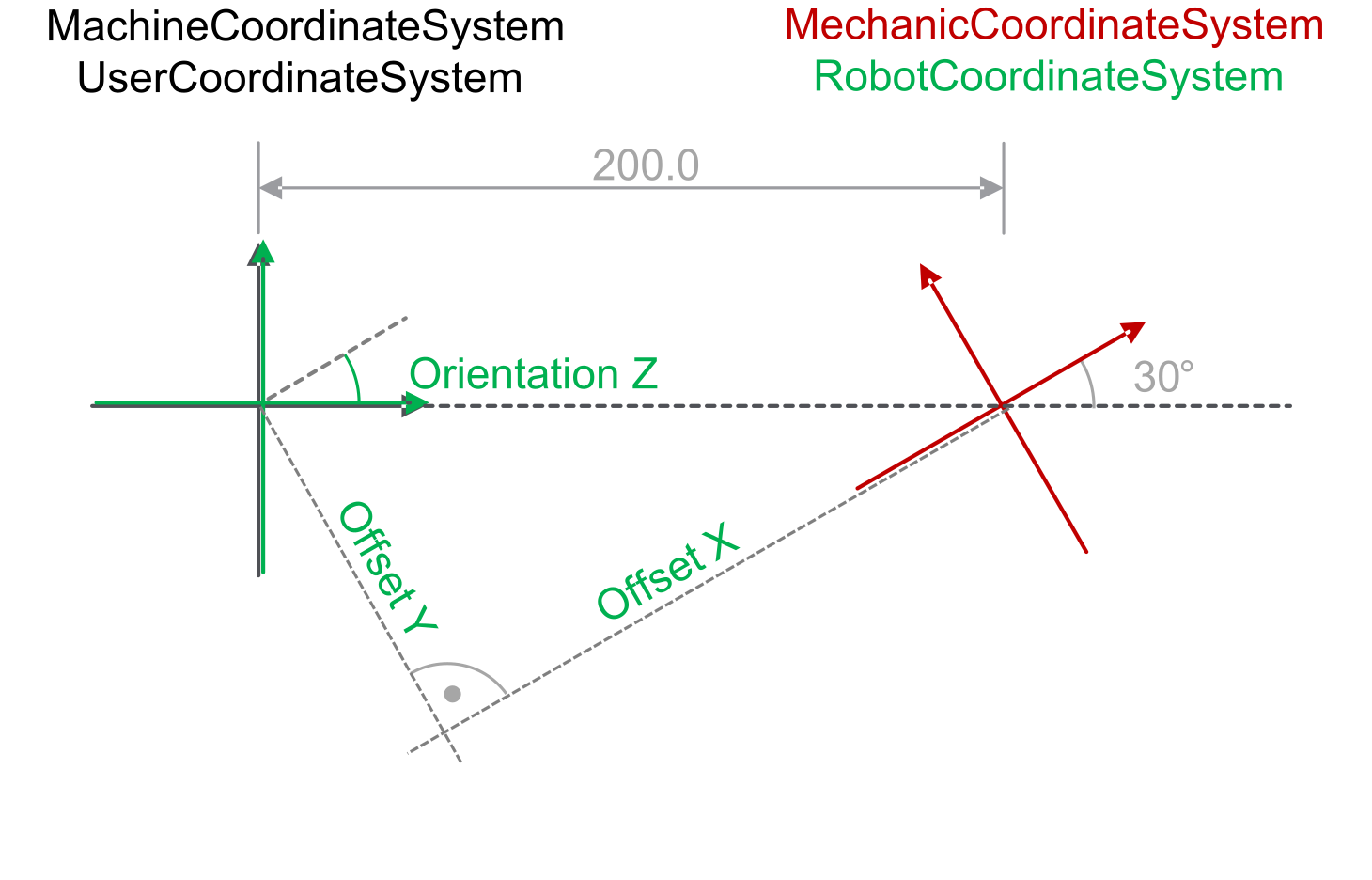
Abrufen der Orientierung über Z für das Roboterkoordinatensystem, das sich auf das mechanische Koordinatensystem bezieht:
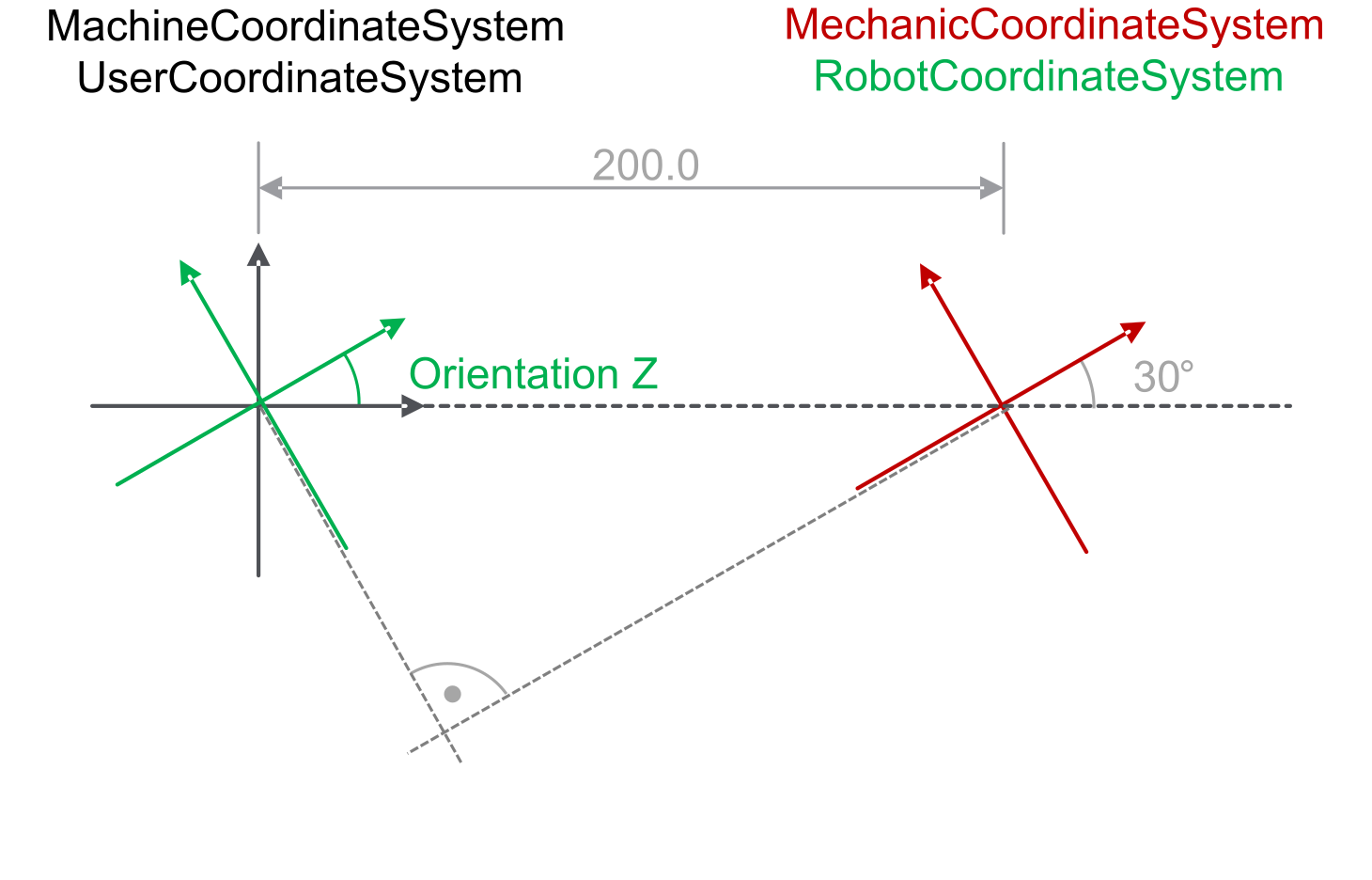
Orientierung Z = - 30
Ergebnis:
-
Offset X = -173,21
-
Offset Y = 100,0
-
Orientierung Z = - 30
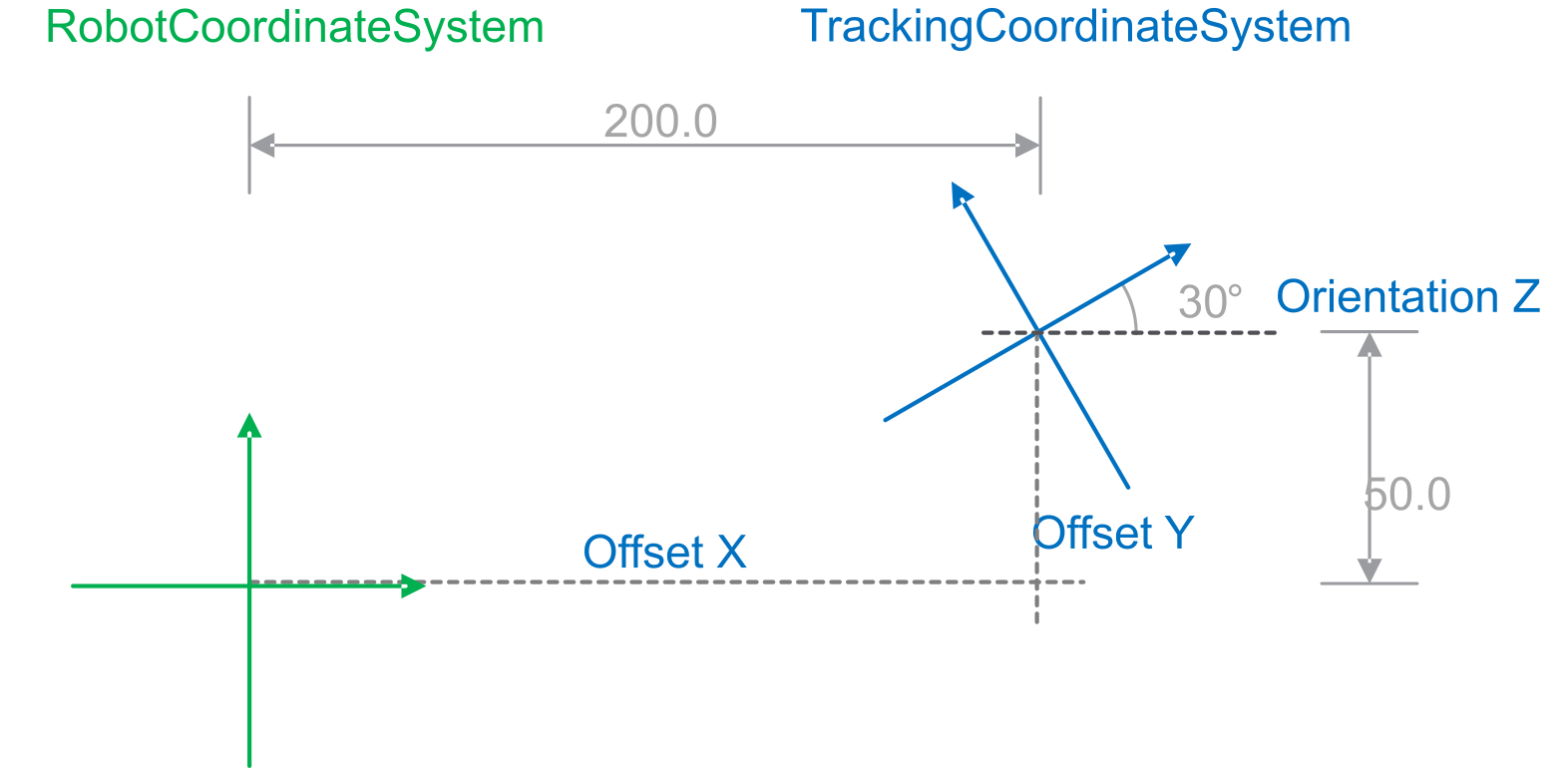
Beispiel - Tracking-Koordinatensystem
Das Tracking-Koordinatensystem:
-
Befindet sich 200,0 mm in positiver X-Richtung des Roboterkoordinatensystems.
-
Befindet sich 50,0 mm in positiver Y-Richtung des Roboterkoordinatensystems.
-
Wird um 30° in Bezug auf das Roboterkoordinatensystem gedreht.
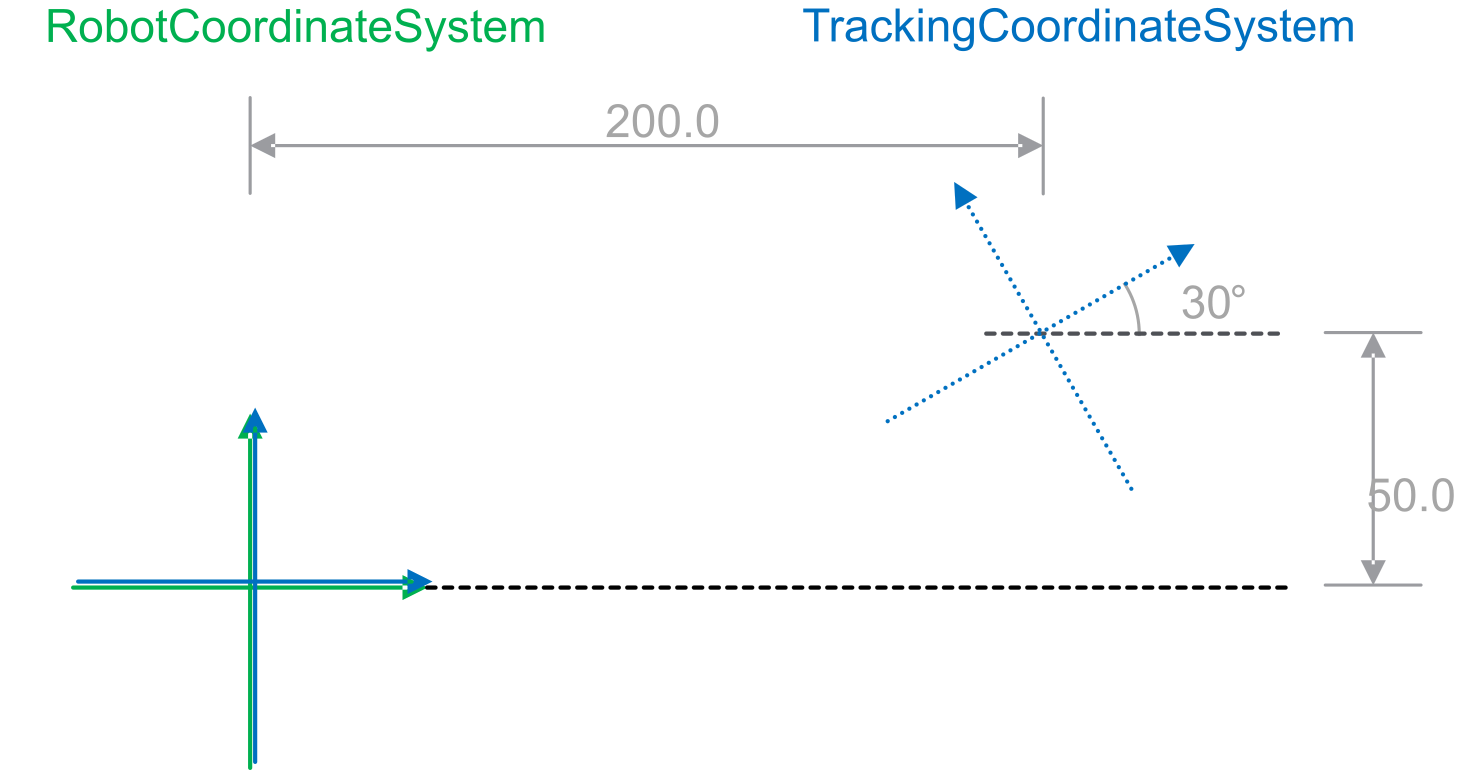
Ziel ist die Parametrierung des Tracking-Koordinatensystems in Bezug auf das Roboterkoordinatensystem.
-
Dem Roboter wird ein Trackingsystem oder eine Trackingquelle hinzugefügt.
-
Die ModifyCoordinateSystem- oder die ModifyCoordinateSystem2-Methode wird für ein Tracking-Koordinatensystem aufgerufen.
Ergebnis:
-
Offset X = 200,0
-
Offset Y = 50,0
-
Orientierung Z = 30,0