Verwendung der Positionsüberwachung
Allgemeine Informationen
Die Positionsüberwachung soll in der Inbetriebnahmephase verwendet werden, um zu vermeiden, dass der Roboter versucht, einer Trackingquelle zu folgen, die eine inkonsistente Position meldet.
Um die Positionsüberwachung zu aktivieren, muss für eine Komponente mit der Methode IF_TrackingSource.EnablePositionMonitoring eine maximale Beschleunigung über null festgelegt werden.
Wenn diese maximale Beschleunigung eingestellt ist, wird die Beschleunigung der Komponente aus den gemeldeten Positionen berechnet. Sobald die berechnete Beschleunigung größer als der Maximalwert ist, wird ein Steuerungsstopp an den Roboterachsen durchgeführt.
Konfiguration
Der konfigurierbare Mindestgrenzwert muss größer sein als die maximale Beschleunigung der Quelle. Andernfalls löst die reguläre Beschleunigung einen Stopp aus.
Es muss ein gewisser Spielraum vorhanden sein, z. B. für eine verzerrte oder verrauschte Position der Quelle oder wenn der Umrichter seine maximale Beschleunigung aufgrund des Regelkreises überschreitet.
Der Maximalwert des Grenzwerts hängt von der maximalen Beschleunigung ab, die der Roboter bewegen kann. Der Maximalwert muss kleiner sein, sodass der Roboter gestoppt wird, wenn das Positionsdelta von der Quelle eine höhere Beschleunigung erfordert.
Einschränkungen
Welche minimale Inkonsistenz erkannt werden kann, hängt von der Sercos-Zykluszeit und der vorgegebenen maximalen Beschleunigungsgrenze ab.
Minimale Inkonsistenz = Maximale Beschleunigung * (Sercos-Zykluszeit)².
Wenn beispielsweise eine maximale Beschleunigung von 3000 mm/s² konfiguriert ist und die Sercos-Zykluszeit 1 ms beträgt, kann eine minimale Inkonsistenz von 0,003 mm erkannt werden. (3000 mm/s² * (0,001 s)² = 0,003 mm.)
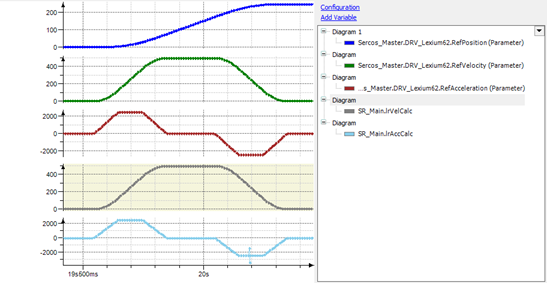
In der folgenden Spur wurde eine SetPos von 0,001 mm ausgeführt, während sich die Achse mit konstanter Geschwindigkeit bewegte. Da dies zu einer Beschleunigung von ±1000 mm/s² führt und diese geringer ist als die maximale Beschleunigung des Antriebs, kann diese Inkonsistenz nicht erkannt werden.
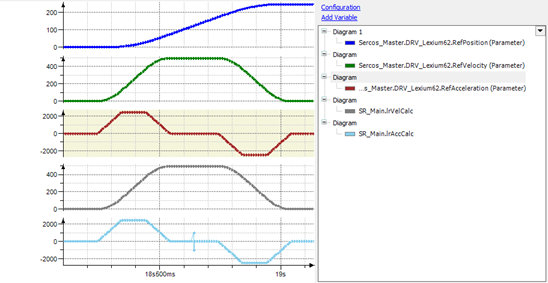
Wenn während der Verzögerungsphase dieselbe SetPos auftritt, kann dies erkannt werden, da die Beschleunigung summiert wird.
Wenn die Quelle nicht vom Roboter verwendet wird (Eigenschaft xInUse ist FALSE), wird die Position nicht überwacht. Dadurch können Sie die Position der Quelle ändern, bevor ein Tracking gestartet wird.
Daher kann der Algorithmus in den ersten beiden Sercos-Zyklen, die die Quelle für das Tracking verwendet, keine Inkonsistenz erkennen. Um aus den Positionen eine Beschleunigung berechnen zu können, ist eine Abfolge von mindestens drei Positionen erforderlich.