Verwendung von ExternalPositionSourceLimit
Allgemeine Informationen
Die Methode ExternalPositionSourceLimit wird bei der Inbetriebnahme verwenerdet, um zu vermeiden, dass der Roboter einer inkonsistenten Kurve (CAM) der externen Positionsquelle folgt. Überwachen Sie alle verfügbaren Komponenten.
Konfiguration
Der zu konfigurierende Mindestwert muss größer sein als die für die externe Positionsquelle verwendete Beschleunigung. Sehen Sie einen kleinen Spielraum vor, damit der Algorithmus nicht ausgelöst wird, wenn die externe Positionsquelle die entsprechende maximale Beschleunigung aufgrund eines Regelkreises leicht überschreitet.
Es muss ebenfalls eine Toleranz gegeben sein, damit der Algorithmus nicht ausgelöst wird, wenn das Positionssignal von der Quelle verzerrt ist.
Je weiter der Grenzwert vom Höchstwert entfernt liegt, umso geringer ist die Wahrscheinlichkeit, dass ein falsch-positives Ergebnis ausgelöst wird.
Der zu konfigurierende Höchstwert ist von der maximalen Beschleunigung abhängig, mit der der Roboter sich bewegen kann. Der Wert für die Begrenzung muss kleiner sein als dieser Wert, damit der Roboter angehalten wird, sobald eine Position eine höhere Beschleunigung verursacht.
Die meisten Inkonsistenzen verursachen zwei Beschleunigungsspitzen: eine in dem Zyklus, in dem die Inkonsistenz auftritt, und eine im darauffolgenden Zyklus.
Beispiele
Die folgende Grafik zeigt drei Beispiele, in denen SetPos = 0,0015 auf drei unterschiedliche Verfahrbewegungen mit einer Beschleunigung von 1000 mm/s² angewendet wird. Die Begrenzung ist auf 1250 mm/s² festgelegt.
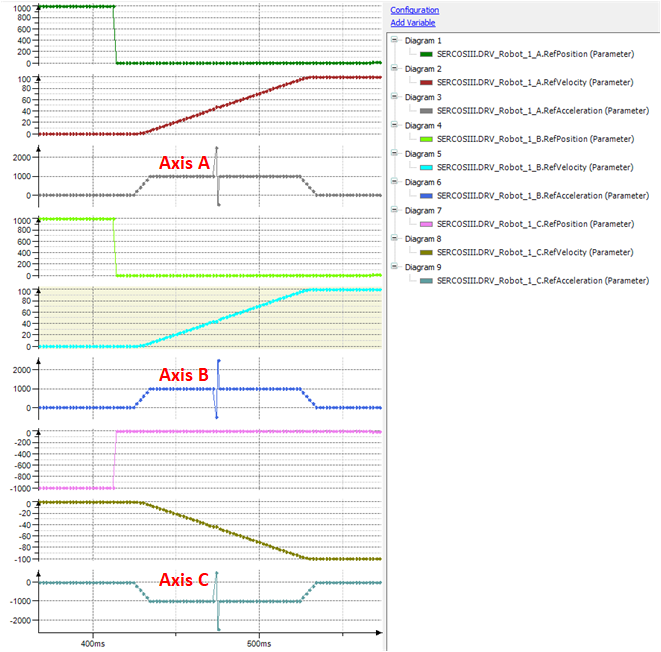
Achse A bewegt sich vorwärts, und da SetPos einen positiven Wert aufweist, erhöht sich die Beschleunigung unmittelbar auf 2500 mm/s². Dadurch würde die Begrenzung einen Stopp auslösen.
Achse B bewegt sich ebenfalls vorwärts, SetPos hat einen negativen Wert. Aus diesem Grund fällt die Beschleunigung auf -500 mm/s² ab. Das würde keinen Stopp auslösen, da der Wert kleiner ist als die Begrenzung. Im folgenden Zyklus „springt“ die Beschleunigung auf 2500 mm/s², was ebenfalls einen Stopp auslösen würde.
Achse C bewegt sich rückwärts und weist einen positiven Wert für SetPos auf. Folglich würde der zweite Zyklus den Grenzwert überschreiten und einen Stopp auslösen.
Im folgenden Beispiel bewegt sich der Antrieb mit konstanter Geschwindigkeit ohne Beschleunigung. Jeder SetPos-Wert unter 0,00125 mm löst keine Begrenzung aus, da die resultierende Beschleunigung unter dem Schwellenwert liegt.
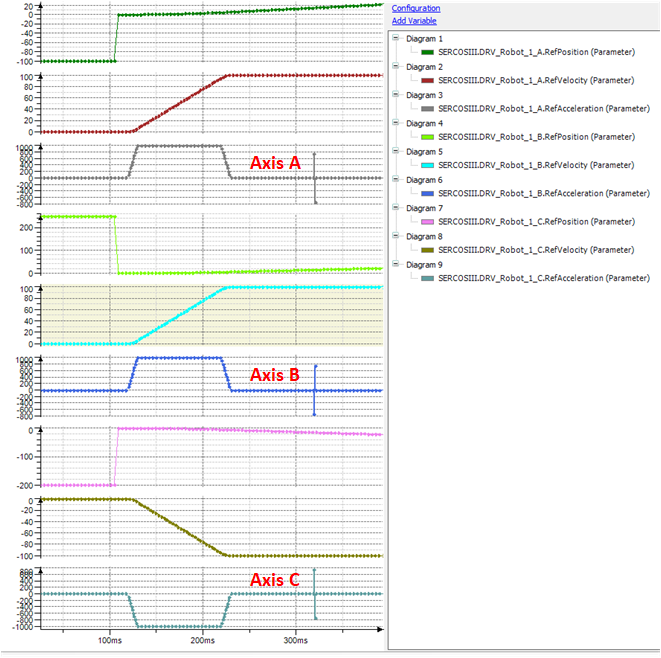
Der Beispielverlauf zeigt einen Setpos-Wert von 0,00075 während einer Phase konstanter Geschwindigkeit an allen drei Achsen, was keinen Stopp auslösen würde.