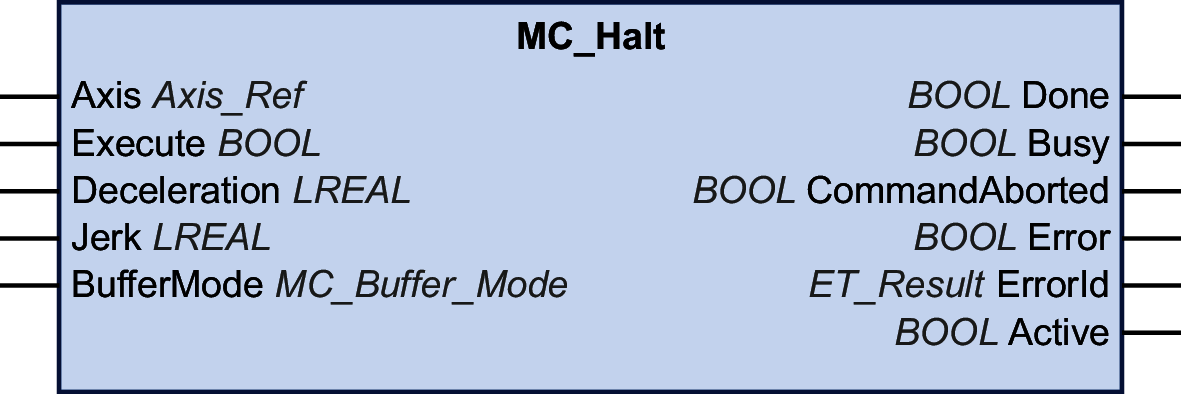
MC_Halt
Funktionsbeschreibung
Dieser Funktionsbaustein dient zum Stoppen der aktuellen Bewegung. Der Funktionsbaustein kann durch andere Funktionsbausteine abgebrochen werden. Siehe MC_Stop für einen Halt, der nicht abgebrochen werden kann.
Wenn dieser Funktionsbaustein gestartet wird, wird die Ausführung jedes anderen Funktionsbaustein abgebrochen.
Die Ausführung des Funktionsbausteins MC_Halt kann durch einen anderen Funktionsbaustein im nicht gepufferten Modus abgebrochen werden.
Wenn der Funktionsbaustein MC_Halt ausgelöst wird, wechselt die Achse in den PLCopen-Betriebszustand Discrete Motion und bleibt in diesem Betriebszustand bis zum Stillstand des Motors oder bis ein anderer Funktionsbaustein gestartet wurde. Sobald der Motor zum Stillstand gekommen ist, wird der Ausgang Done gesetzt, und die Achse wechselt in den Betriebszustand StandStill.
Im Gegensatz zum Funktionsbaustein MC_Stop, der in erster Linie für Notstopp-Funktionen vorgesehen ist, ist der Funktionsbaustein MC_Halt für den regulären Betrieb der Achse vorgesehen.
Eingänge
|
Eingang |
Datentyp |
Beschreibung |
|---|---|---|
|
Axis |
Axis_Ref |
Verweis auf die Achse, für die der Funktionsbaustein ausgeführt werden soll. |
|
Execute |
BOOL |
Wertebereich: FALSE, TRUE. Standardwert: FALSE. Eine steigende Flanke des Eingangs Execute startet den Funktionsbaustein. Der Funktionsbaustein setzt die Ausführung fort, und der Ausgang Busy wird auf TRUE gesetzt. Dieser Funktionsbaustein kann während seiner Ausführung neu gestartet werden. Die Zielwerte werden zum Zeitpunkt des Auftretens der steigenden Flanke durch die neuen Werte überschrieben. |
|
Deceleration |
LREAL |
Wertebereich: Ein positiver LREAL-Wert Standardwert: 0 Verzögerung in Anwendereinheiten. |
|
Jerk |
LREAL |
Wertebereich: Ein positiver LREAL-Wert und null
Standardwert: 0 |
|
BufferMode |
Standardwert: Aborting Puffermodus. Mögliche Werte:
Eine Beschreibung der Werte finden Sie unter MC_Buffer_Mode. |
Ausgänge
|
Ausgang |
Datentyp |
Beschreibung |
|---|---|---|
|
Done |
BOOL |
Wertebereich: FALSE, TRUE. Standardwert: FALSE.
|
|
Busy |
BOOL |
Wertebereich: FALSE, TRUE. Standardwert: FALSE.
|
|
CommandAborted |
BOOL |
Wertebereich: FALSE, TRUE. Standardwert: FALSE.
|
|
Error |
BOOL |
Wertebereich: FALSE, TRUE. Standardwert: FALSE.
|
|
ErrorID |
Diese Aufzählung stellt Diagnoseinformationen zur Verfügung. |
|
|
Active |
BOOL |
Wertebereich: FALSE, TRUE. Standardwert: FALSE.
|