STO - Sicher abgeschaltetes Drehmoment (Safe Torque Off)
Allgemeine Funktionsbeschreibung
Die STO-Funktion ist die gängigste und grundlegende im Antrieb integrierte Sicherheitsfunktion. Wenn STO aktiviert ist, wird der Motor nicht mehr mit rotations- oder bewegungsverursachender Energie versorgt. Die Leistungsendstufe des Antriebs liefert dem Motor keinerlei Energie, die Drehmoment oder (im Falle eines linearen Motors) Kraft erzeugen kann.
Eine aktive STO-Funktion führt zu einer nachfolgenden Anlauf-/Wiederanlaufsperre (siehe Abschnitt unten).
Die STO-Funktion verhindert gemäß EN 60204-1, Abschnitt 5.4, einen unbeabsichtigten Start. Die aktive STO-Funktion deaktiviert die Leistungsendstufe im Antrieb. Der Antrieb ist dann drehmomentfrei. Dieser Zustand wird im Antrieb intern überwacht.
Anforderung/Überwachung durch den sicherheitsbezogenen FB bzw. das Safety-Modul
Sofort nach der STO-Aktivierung, wird der Antrieb drehmomentfrei gesetzt und die Achse läuft aus bis Geschwindigkeit Null erreicht ist.
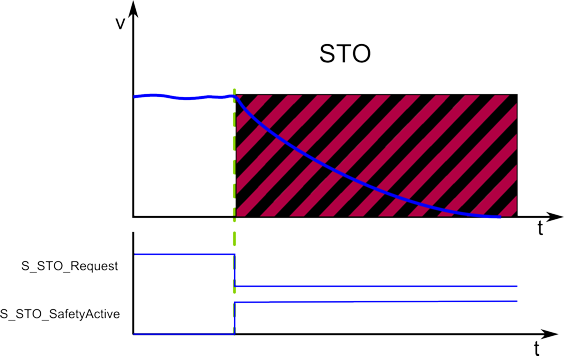
Die STO-Sicherheitsfunktion wird sofort bei Anforderung ausgeführt. STO kann angefordert werden, indem das Signal an Eingang S_STO_Request (falls Eingang Activate = TRUE) auf SAFEFALSE gesteuert wird oder über die festverdrahtete Verbindung (falls der Geräteparameter des Safety-Moduls HW_STO = Aktiviert). Beachten Sie den nachfolgenden Abschnitt.
Der drehmomentfreie Zustand des Antriebs wird angezeigt, indem der Bausteinausgang S_STO_SafetyActive auf SAFETRUE gesteuert wird.
Nach dem Anzeigen der aktiven STO-Funktion läuft die Achse aus. Deshalb ist S_STO_SafetyActive = SAFETRUE nicht zwingend gleichbedeutend mit dem Stillstand der Achse. Die Auslaufzeit hängt von den physikalischen Eigenschaften der verwendeten Komponenten ab, wie z.B. Gewicht, Drehmoment, Reibung, usw.
| WARNUNG | |
|---|---|
Anwendung
Da die STO-Funktion des Antriebs die Leistungsstufe des Motors deaktiviert, kann sie in Anwendungen eingesetzt werden, in denen die Achse aufgrund ihres Lastmoments oder Reibung in einer ausreichend kurzen Zeit von selbst zum Stillstand kommt, oder wenn das Auslaufen der Achse keine Sicherheitsrelevanz hat.
STO als allgemeiner funktional sicherer Zustand: Die STO-Funktion ist als der standardmäßige funktional sichere Zustand definiert. Die STO-Funktion ist deshalb die finale Fallback-Funktion der weiteren hier beschriebenen Sicherheitsfunktionen.
STO-Anforderung über den Funktionsbaustein oder festverdrahtet
In Abhängigkeit von Ihren Anforderungen und der Implementierung des Systems, haben Sie zwei Möglichkeiten, um die STO-Funktion anzufordern:
-
Über den Eingang S_STO_Request des Funktionsbausteins (übermittelt via SERCOS-Bus)
-
Zusätzlich über die festverdrahtete Signalverbindung. Dazu muss der Parameter
HW_STOaufAktivierteingestellt sein (siehe Abschnitt unten).
Weitere Informationen dazu erhalten Sie im Thema "STO, festverdrahtet".
Anlaufsperre: STO nach der Bausteinaktivierung
Das Safety-Modul geht nach dem Anlauf automatisch in den funktional sicheren Zustand STO. Gemäß der zutreffenden Norm IEC 60204-1, führt die STO-Funktion Stopp-Kategorie 0 aus. Diese Stopp-Kategorie bedingt eine nachfolgende Anlaufsperre. Die Anlaufsperre wird erst durch eine positive Signalflanke an Eingang Reset des sicherheitsbezogenen Funktionsbausteins aufgehoben.
Wiederanlaufsperre nach STO
Nach Aufhebung der Anforderung der STO-Funktion, indem der betreffende Bausteineingang von SAFEFALSE auf SAFETRUE gesteuert wird, ist automatisch eine Wiederanlaufsperre aktiv, um den unbeabsichtigten Wiederanlauf der Achse zu verhindern. Gemäß der zutreffenden Norm IEC 60204-1, führt die STO-Funktion Stopp-Kategorie 0 aus. Diese Stopp-Kategorie bedingt eine nachfolgende Wiederanlaufsperre. Die Wiederanlaufsperre wird erst durch eine positive Signalflanke an Eingang Reset des sicherheitsbezogenen Funktionsbausteins aufgehoben.
Relevante Geräteparameter des Safety-Moduls
So bearbeiten Sie die relevanten sicherheitsbezogenen Geräteparameter: Im EcoStruxure Machine Expert - Safety-'Geräte'-Fenster, ...
-
Klicken Sie mit der linken Maustaste auf das Safety-Modul im Gerätebaum.
-
Blättern Sie im Geräteparametrierungseditor auf der rechten Seite bis zum relevanten Parameterbereich (siehe Tabellenüberschrift unten).
-
Definieren Sie die in der nachfolgenden Tabelle beschriebenen Parameter für diese Sicherheitsfunktion.
Detailinformationen zum Wertebereich und Standardwert dieses Parameters finden Sie im entsprechenden Kapitel zum verwendeten Sicherheitsmodul im Handbuch "Parameter und Prozessdaten der Sicherheitsmodule".
|
Parameterbereich: Basic |
|
|---|---|
|
|
|
| WARNUNG | |
|---|---|
Relevante Ein-/Ausgänge des Funktionsbausteins und Bits im Statuswort
-
Anforderung der Funktion über Bausteineingang S_STO_Request = SAFEFALSE
-
Anzeige des Funktionsstatus an Bausteinausgang S_STO_SafetyActive (SAFETRUE = Sicherheitsfunktion aktiviert)
Im DWORD, ausgegeben an AxisStatus
Bit 0:
HW_STO(TRUE = ParameterHW_STOdes Safety-Moduls aufAktivierteingestellt)Bit 1: STO-Status (TRUE = Sicherheitsfunktion aktiviert)