Axis mode (Registerkartenbereich)
Registerkarte „Homing“
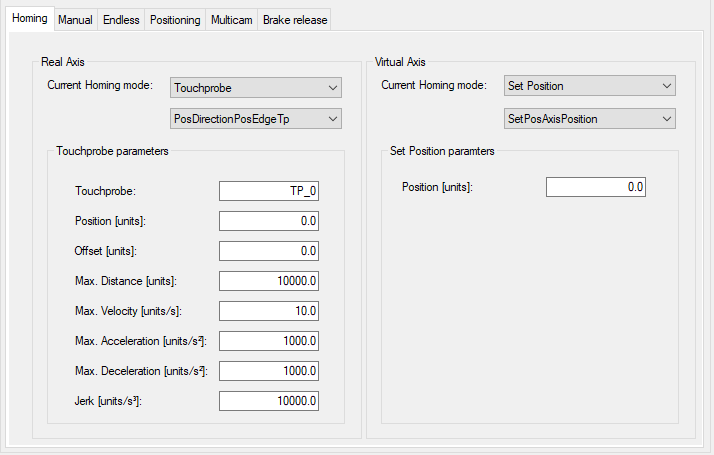
Auf der Registerkarte können Sie den Homing-Modus für eine (linker Bereich) und für eine (rechter Bereich) auswählen und parametrieren.
Die Auswahl und Parametrierung des Homing-Modus für eine und für eine sind identisch.
Alle Homing-Modi des werden unterstützt (siehe das PD_AxisModule-Bibliothekshandbuch, AXM.ST_ModuleInterface.ST_Home).
/
|
Element |
Beschreibung |
|---|---|
|
|
Wählen Sie einen Homing-Modus aus (siehe nachstehende Details): Zusätzlich können verschiedene Parameter für den Homing-Modus ausgewählt werden. Beispiel: Für steht zur Auswahl. |
|
|
Geben Sie die Parameter für den ausgewählten Homing-Modus ein. Beispiel: . |
Homing-Modi:
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeTp und PDL.ET_HomeTpMode.
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeIn und PDL.ET_HomeInMode.
Für die Verwendung des Sensorwerts PDL.ST_HomeIn.i_xSensor stehen zwei Möglichkeiten zur Auswahl:
-
Sie können die Eigenschaft SR_<AxisName>.xHomingSensor verwenden. Siehe die Registerkarte .
-
Sie können einen Wert in die Struktur in der Methode Logic schreiben.
Die Eigenschaft und die Strukturvariable stSensor.i_xSensor sind über eine OR-Bedingung miteinander verknüpft.
-
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeLimitSwitch und PDL.ET_HomeLimitSwitchMode.
Für die Verwendung des Sensorwerts AXM.ST_Main.i_xHwLimitPos/ i_xHwLimitNeg stehen zwei Möglichkeiten zur Auswahl:
-
Sie können die Eigenschaft SR_<AxisName>.xHwLimitSwitchPos / SR_<AxisName>.xHwLimitSwitchNeg verwenden. Siehe die Registerkarte .
-
Sie können einen Wert in die Struktur in der Methode Logic schreiben.
Die Eigenschaft und die Strukturvariable stMain.i_xHwLimitPos / stMain.i_xHwLimitNeg sind über eine OR-Bedingung miteinander verknüpft.
-
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeTorque und PDL.ET_HomeTorqueMode.
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeMoveOnPos.
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeSetPos und PDL.ET_HomeSetPosMode.
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeSetPos und PDL.ET_HomeSetPosMode.
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeWritePos.
Registerkarte „Manual“
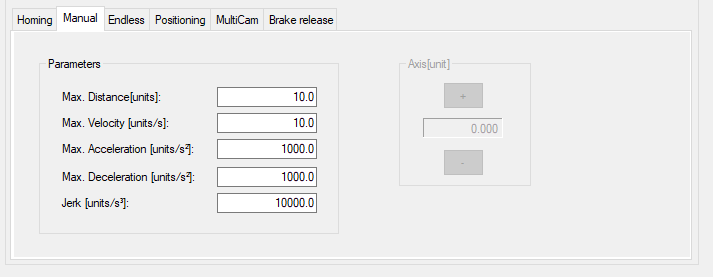
Auf der Registerkarte können Sie die Paramter für die Betriebsart Manual bearbeiten und die Achse manuell verfahren. Ein Verfahren der Achse ist möglich, wenn sich das Modul im Online-Modus befindet und die Betriebsart Manual aktiviert wurde.
Ausführliche Informationen zu den Parametern finden Sie im PD_AxisModule-Bibliothekshandbuch, AXM.ST_Manual.
| WARNUNG | |
|---|---|
|
Element |
Beschreibung |
|---|---|
|
|
Bearbeitung der Parameter für die Betriebsart Manual: Ausführliche Informationen zu den Parametern finden Sie im PD_AxisModule-Bibliothekshandbuch, AXM.ST_Manual. |
|
|
Klicken Sie auf die Schaltflächen (/) für eine Verfahrbewegung (Jog) entlang der Achse durch Steuerung der entsprechenden Antriebe. |
Registerkarte „Endless“
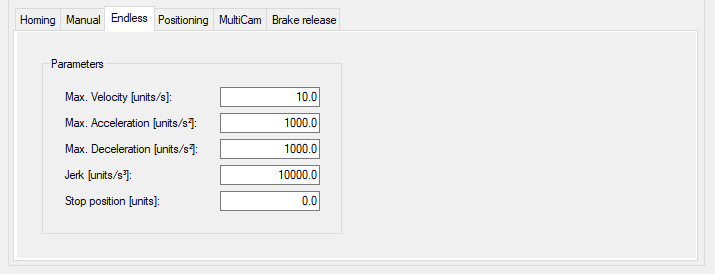
Auf der Registerkarte können Sie die Parameter für die Betriebsart Endless bearbeiten.
Ausführliche Informationen zu den Parametern finden Sie im PD_AxisModule-Bibliothekshandbuch, AXM.ST_EndlessFeed.
|
Element |
Beschreibung |
|---|---|
|
|
Bearbeiten Sie die Parameter für die Betriebsart Endless: Ausführliche Informationen zu den Parametern finden Sie im PD_AxisModule-Bibliothekshandbuch, AXM.ST_EndlessFeed. |
Registerkarte „Positioning“
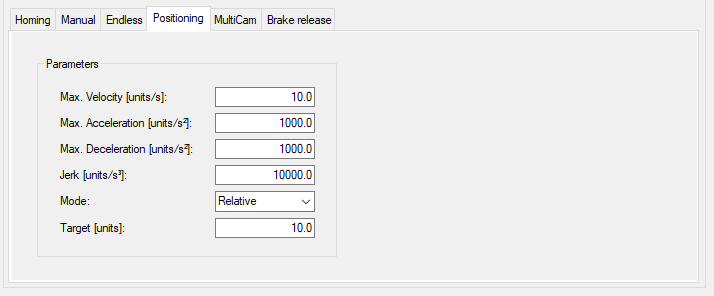
Auf der Registerkarte können Sie die Parameter für die Betriebsart Positioning bearbeiten.
Ausführliche Informationen zu den Parametern finden Sie im PD_AxisModule-Bibliothekshandbuch, AXM.ST_Positioning.
|
Element |
Beschreibung |
|---|---|
|
|
Bearbeiten Sie die Parameter für die Betriebsart Positioning: Ausführliche Informationen zu den Parametern finden Sie im PD_AxisModule-Bibliothekshandbuch, AXM.ST_Positioning. |
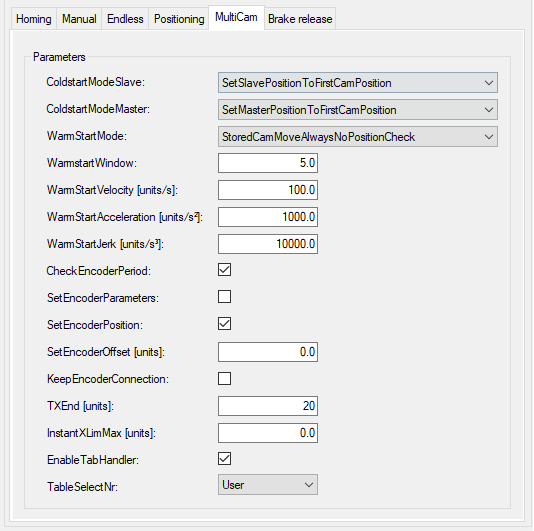
Registerkarte „Multicam“
Auf der Registerkarte können Sie die Parameter für die Betriebsart Multicam bearbeiten.
Ausführliche Informationen zu den Parametern finden Sie im PD_AxisModule-Bibliothekshandbuch, AXM.ST_MultiCam.
Die Registerkarte umfasst zwei Bereiche:
|
Element |
Beschreibung |
|---|---|
|
|
Bearbeiten Sie die Parameter für die Betriebsart Positioning: Ausführliche Informationen zu den Parametern finden Sie im PD_AxisModule-Bibliothekshandbuch, AXM.ST_MultiCam. |
|
Element |
Beschreibung |
|---|---|
|
|
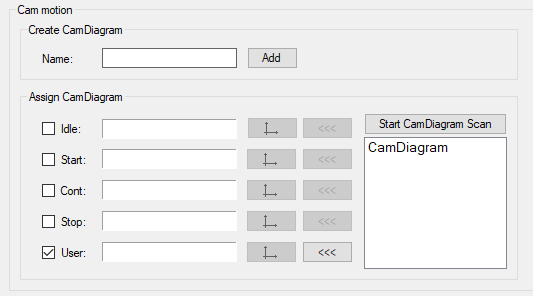
Geben Sie einen Wert in das Feld ein und klicken Sie auf die Schaltfläche . Ergebnis: Ein wird in der Baumstruktur unter dem Knoten angezeigt. Ausführliche Informationen zur Konfiguration eines finden Sie im PD_PacDriveLib-Bibliothekshandbuch, Beschreibung des FB_MultiCam, sowie im Programmierhandbuch von EcoStruxure Machine Expert, Cam Motion Editor. |
|
|
Weisen Sie einem Bewegungsablauf ein zu.
Ein kann mehreren Bewegungsabläufen zugewiesen werden. |
Die Beschreibung des Bewegungsablaufs wird in einer Struktur des Typs PDL.ST_MultiCam gespeichert. Sie enthält die Anzahl der Stützpunkte (maximal 32) und ein Array von Punkten des Typs PDL.ST_CamPoint. Durch eine Änderung der Struktur können verschiedene Bewegungsabläufe ereignisgesteuerten Zyklen zugewiesen werden (z. B. Leertakt (Idle), Anfahrzyklus (Start), Dauerlaufzyklus (Cont), Stoppzyklus (Stop), anwenderspezifischer Zyklus (User)). Diesen fünf Bewegungsabläufen können bis zu fünf zugewiesen werden. In Verbindung mit dem Enumerationstyp PD_AxisModule.ET_ParId kann damit eine der MultiCam-Tabellen ausgewählt werden. Die Namen in der Enumeration verweisen auf die fünf Nockenprofile: , , , , .
Da nur der PDL.ST_MultiCam-Strukturtyp vom Smart Template-Modul Axis Module unterstützt wird, aktivieren Sie die Option und wählen Sie PDL.ST_MultiCam aus.
Bei Laufzeit generiert das System die entsprechende iq_astMotionPar-Struktur ausgehend vom zugewiesenen .
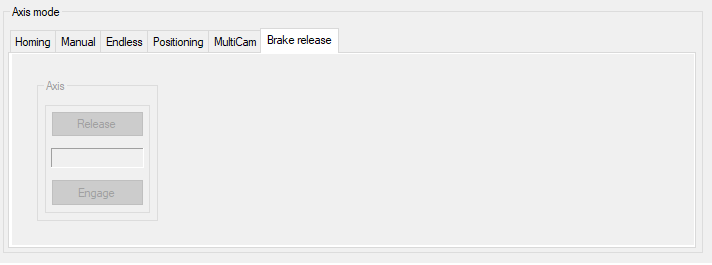
Registerkarte „Brake release“
Auf der Registerkarte können Sie die Bremse einer Achse lösen/aktivieren.
Eine Steuerung der Bremse ist möglich, wenn sich das Modul im Online-Modus befindet und die Betriebsart Brake release aktiviert wurde.
Es wird nicht überprüft, ob der Motor mit einer Bremse ausgestattet ist oder nicht.
|
Element |
Beschreibung |
|---|---|
|
|
Die Anzeige zwischen den Schaltflächen und verweist auf den Status der Bremse.
HINWEIS: Die Schaltflächen sind nur aktiviert, wenn sich das Achsmodul in der Betriebsart BrakeRelease befindet.
|