Zusätzliche Konfigurationen
Überblick
|
Position |
Beschreibung |
|---|---|
|
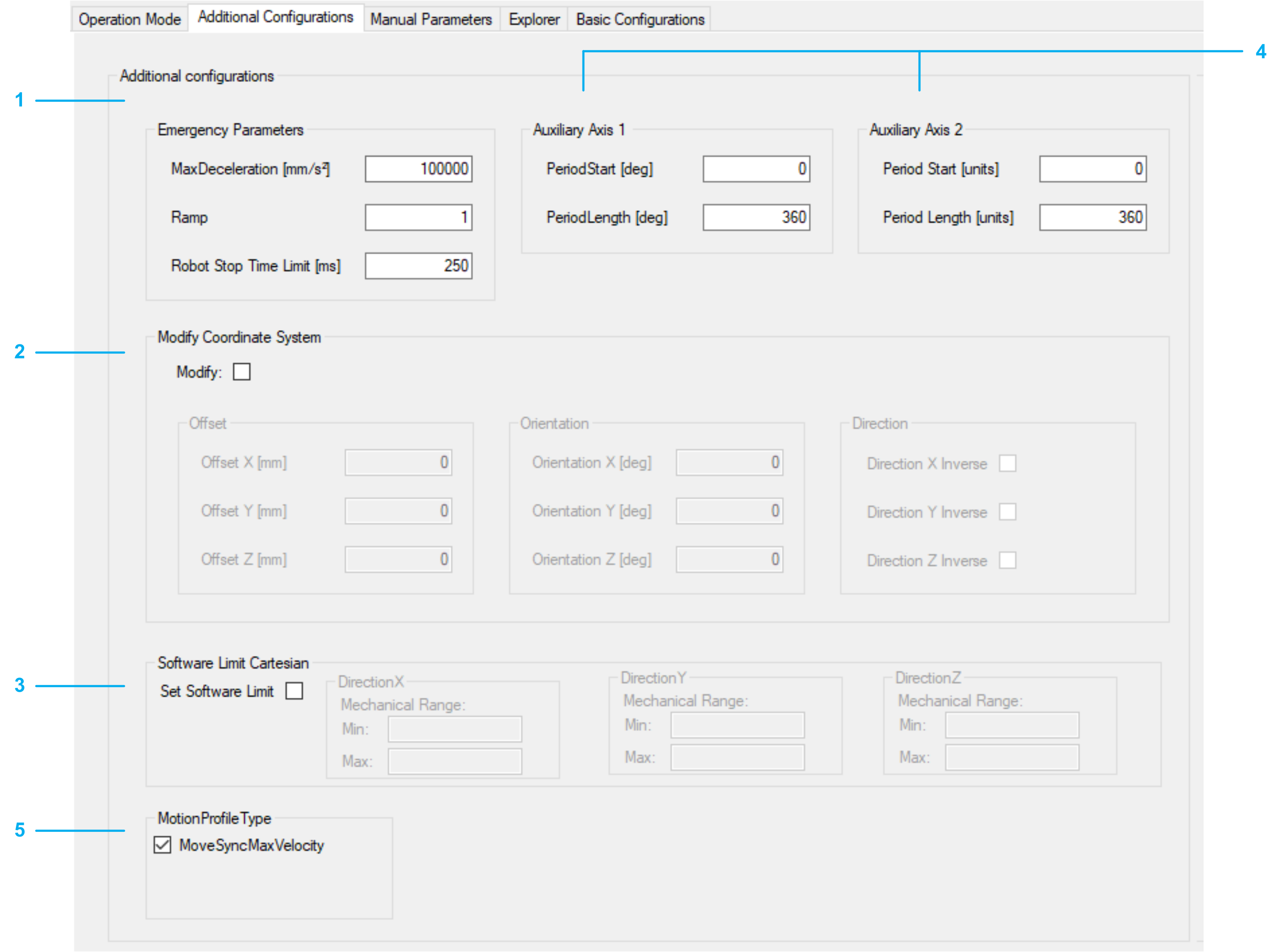
1 |
Die erforderlichen Daten für einen Nothalt müssen konfiguriert werden. Detaillierte Informationen finden Sie hier: SetEmergencyParameter im RoboticModule-Bibliothekshandbuch. |
|
2 |
Das Roboterkoordinatensystem kann geändert werden. Wenn das Kontrollkästchen nicht aktiviert ist, dann ist das Koordinatensystem auf die vom ausgewählten Roboter vorgegebenen Standardwerte eingestellt. Detaillierte Informationen finden Sie hier: ModifyCoordinateSystem im RoboticModule-Bibliothekshandbuch. |
|
3 |
Wenn Set SoftwareLimit ausgewählt ist, werden die Software-Grenzwerte für ROB.ET_RobotComponent.CartesianX/ CartesianY / CartesianZ festgelegt. Nachdem Set SoftwareLimit ausgewählt wurde, sind die Standardwerte die Werte des mechanischen Bereichs. Die Methode RM.IF_SoftwareLimit.ExecuteLimits() wird automatisch aufgerufen Detaillierte Informationen finden Sie hier: IF_SoftwareLimit im RoboticModule-Bibliothekshandbuch. |
|
4 |
/ Passen Sie ggf. die Periode für die Hilfsachse an. Nur sichtbar, wenn der Roboter über eine Hilfsachse verfügt. Detaillierte Informationen finden Sie hier: AddAuxAx im RoboticModule-Bibliothekshandbuch. |
|
5 |
Aktivieren Sie das Kontrollkästchen MoveSyncMaxVelocity, um das Bewegungsprofil ET_MotionProfileType.MoveSyncMaxVelocity zu verwenden. Detaillierte Informationen finden Sie hier: IF_RobotConfigurationAdvanced - SetMotionProfileType im Robotic-Bibliothekshandbuch.
HINWEIS: MoveSyncMaxVelocity ist nur verfügbar, wenn für den Roboter eine Hilfsachse konfiguriert wurde.
|