Manuelle Parameter
Überblick
|
Element |
Beschreibung |
|---|---|
|
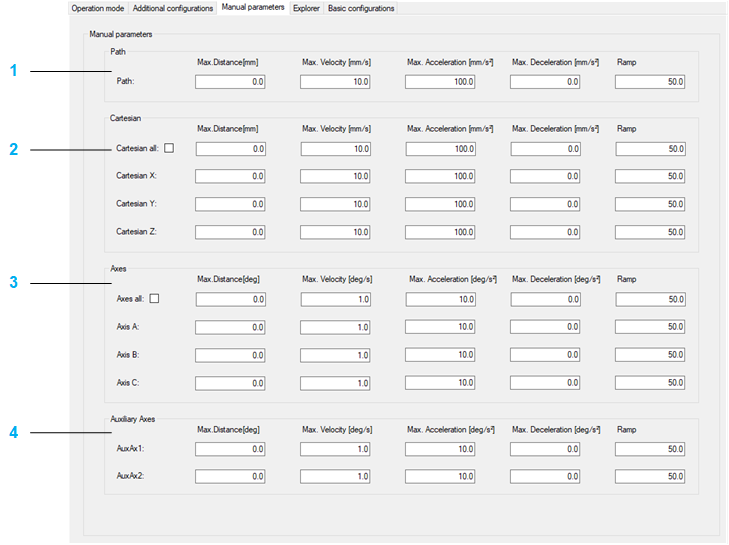
1 |
: Ausgangsparameter für den Tippbetrieb (Jogging) entlang der Roboterbahn. Detaillierte Informationen finden Sie hier: SetParameter im RoboticModule-Bibliothekshandbuch. |
|
2 |
: Ausgangsparameter für den Tippbetrieb des TCP (Tool Center Point / Arbeitspunkt) entlang der entsprechenden kartesischen Achse. Die angezeigten kartesischen Parameter sind von der konfigurierten Arbeitsebene abhängig. Detaillierte Informationen finden Sie hier: SetParameter im RoboticModule-Bibliothekshandbuch. |
|
3 |
: Direkte Steuerung (Jogging) der Motoren der oberen Arme des Roboters. Detaillierte Informationen finden Sie hier: SetParameter im RoboticModule-Bibliothekshandbuch. |
|
4 |
: Ausgangsparameter für den Tippbetrieb (Jogging) der Hilfsachsen (AuxAx). Detaillierte Informationen finden Sie hier: SetParameter im RoboticModule-Bibliothekshandbuch. |