Ziele generieren
Übersicht
Basierend auf dem FB_RandomTargetsGenerator (SchneiderElectricRobotics Toolbox Bibliothekshandbuch) können Sie / erstellen. Anstelle der der Funktionen zum Konfigurieren und Programmieren von FB_RandomTargetsGenerator können Sie die SmartTemplate Benutzeroberfläche (GUI) verwenden, um zufällige Ziele zu erstellen.
Diese Oberfläche wird im Allgemeinen für das Testen der Bewegungslogik mit zufällig generierten Zielen verwenden, wie bei einer echten Applikation.
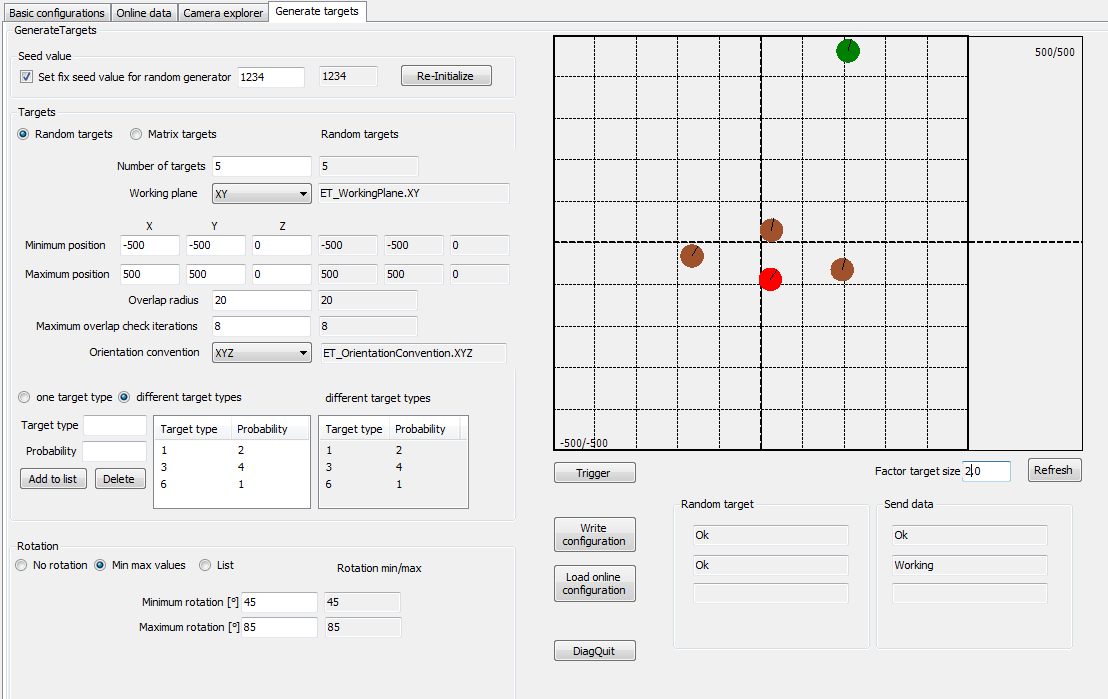
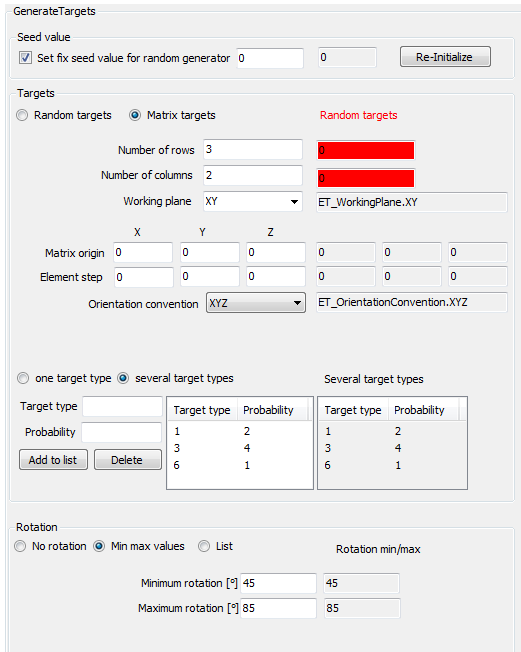
Registerkarte „Generate Targets“
Diese Registerkarte erscheint, wenn Sie das Kontrollkästchen auf der Registerkarte markieren.
-
Auf der linken Seite (weiße Hintergrundfarbe) erscheint die benutzerdefinierte Konfiguration.
-
Auf der rechten Seite (graue Hintergrundfarbe) erscheinen die aktuellen Online-Werte, die für die Erzeugung der Ziele verwendet werden.
Seed-Wert

|
Element |
Beschreibung |
|---|---|
|
Kontrollkästchen |
|
|
button |
Klicken Sie auf diese Schaltfläche, um den Zufallsgenerator mit dem vorgegebenen Seed-Wert erneut zu initialisieren und die aktuelle zufällige Sequenz neu zu starten. |
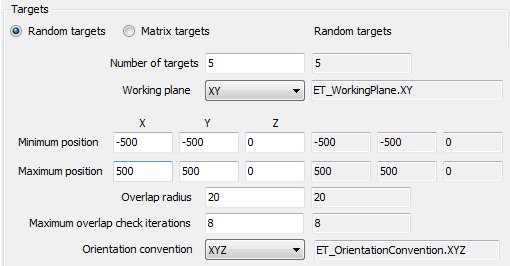
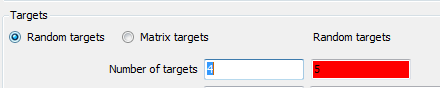
Zufällige Ziele
|
Element |
Beschreibung |
|---|---|
|
|
Anzahl von Zielen, die nach dem Auslösen eines Ereignisses erzeugt werden müssen. |
|
|
Wählen Sie eine Arbeitsebene, z. B. , , (die Position entlang der dritten Achse wird auf 0 gesetzt), und eine Rotation über einen Normalenvektor mit Bezug auf die Ebene. |
|
|
Wert der minimalen Position für das erzeugte Ziel. |
|
|
Wert der maximale Position für das erzeugte Ziel. |
|
|
Um jedes einzelne Ziel definierter Radius eines Kreises. Die Ziele werden so generiert, dass sich die Kreise nicht überlappen. |
|
|
Die maximale Anzahl von Versuchen für die Erzeugung eines Ziels. Wird diese Anzahl von Wiederholungen überschritten, wird eine Fehlermeldung generiert. |
|
|
Konvention für die Rotationswinkel der Orientierung. |
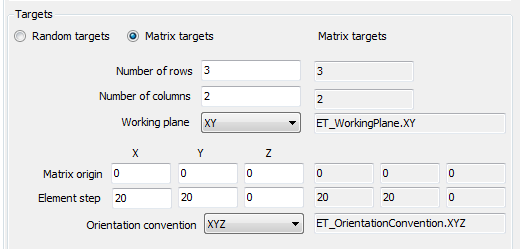
Matrixziele
|
Element |
Beschreibung |
|---|---|
|
|
Die Anzahl der Zeilen in der Matrix für die Ziele. |
|
|
Anzahl der Spalten in der Matrix für die Ziele. |
|
|
Wählen Sie eine Arbeitsebene, z. B., , die Position entlang der dritten Achse wird auf 0 gesetzt), und eine Rotation über einen Normalenvektor mit Bezug auf die Ebene. |
|
|
Position der Matrixplatzierung. Die Ziele werden von dieser Position ausgehend generiert. Diese Position muss in der ausgewählten Arbeitsebene enthalten sein. |
|
|
Positionsschritte, entlang der X-, Y- und Z-Achsen, die für die Erzeugung der Positionen in der Matrix verwendet werden. Die hier angegebenen Werte müssen mit der ausgewählten Arbeitsebene kompatibel sein. |
|
|
Konvention für die Rotationswinkel der Orientierung. |

|
Element |
Beschreibung |
|---|---|
|
|
Es wird nur ein Zieltyp verwendet. In diesem Fall wird der Zieltyp 1 verwendet. |
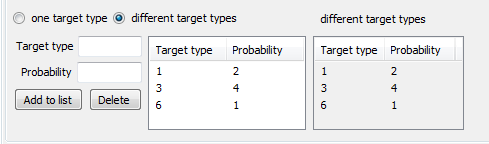
Verschiedene Zieltypen
|
Element |
Beschreibung |
|---|---|
|
|
Es werden verschiedene Zieltypen verwendet. |
|
|
Definiert den Zieltyp. Bereich: 1...10. |
|
|
Die Wahrscheinlichkeit, mit der der Zieltyp erzeugt wird. Siehe Beispiel oben:
|
|
|
Fügt einen ausgewählten Zieltyp bzw. ein ausgewähltes Wahrscheinlichkeitspaar in der Liste hinzu. |
|
|
Entfernt einen ausgewählten Zieltyp bzw. ein ausgewähltes Wahrscheinlichkeitspaar aus der Liste. |
Rotation - Keine Rotation

|
Element |
Beschreibung |
|---|---|
|
|
Es wird kein Rotationswert verwendet. Der Rotationswert für die einzelnen Ziele ist 0. |
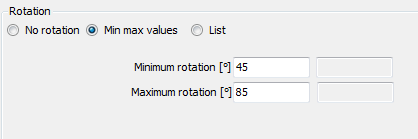
Rotation - Min. Max. Werte
|
Element |
Beschreibung |
|---|---|
|
|
Minimale und maximale Werte für die Rotation. Die erzeugten Rotationswerte sind nach dem Zufallsprinzip in diesem Bereich verteilt. |
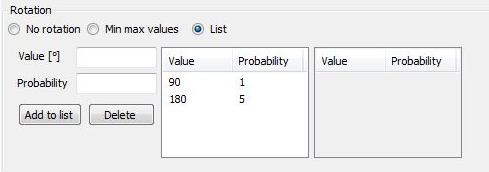
Rotation - Liste
|
Element |
Beschreibung |
|---|---|
|
|
Liste von bis zu 10 Rotationwerten bzw. Wahrscheinlichkeitspaaren für die Erzeugung zufälliger Zieltypen. |
|
|
Rotationswert. |
|
|
Wahrscheinlichkeit für die Erzeugung des Zieltypen. Siehe Beispiel oben:
|
|
|
Fügt einen ausgewählten Rotationswert bzw. ein ausgewähltes Wahrscheinlichkeitspaar in der Liste hinzu. |
|
|
Entfernt einen ausgewählten Rotationswert bzw. ein Wahrscheinlichkeitspaar aus der Liste. |
Benutzeroberfläche verwenden
Sobald Sie eine gültige Konfiguration eingegeben haben, können Sie online gehen.
Auf der rechten Seite (grauer Hintergrund) erscheinen die aktuellen Werte, die für den Logic Motion Controller verwendet werden.
Sie werden über eventuelle Konflikte zwischen den Offline-Konfigurationsparametern und den Online-Werten informiert. Bei Konflikten können Sie wählen, ob die Online-Parameter auf die Offline-Parameter () oder die Parameter auf das Online-Projekt übertragen werden sollen ().
Sobald Sie einen gültigen Satz Variablen eingegeben haben, online gegangen sind und die Erzeugung eines neuen Ziels ausgelöst haben (), werden die generierten Ziele angezeigt und gesendet.
Die Ziele können mit den Methoden GetHeader, GetProducts usw. gelesen werden.
Anzeigen der erzeugten Ziele
Die erzeugten Ziele werden angezeigt.
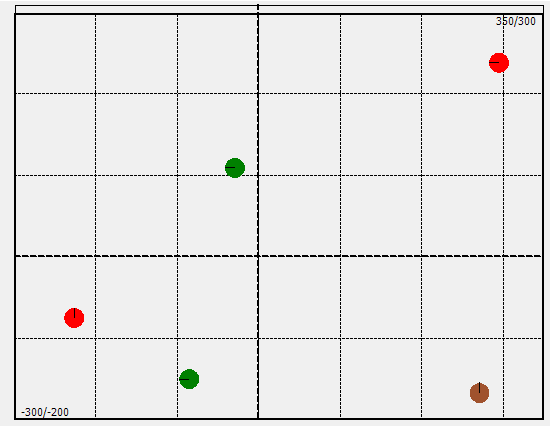
Wenn die angezeigten Ziele nach dem auslösenden Ereignis ( ) nicht aktualisiert werden, kann die Anzeige durch Anklicken der Schaltfläche manuell aktualisiert werden.
Kommt es zu einem Konflikt zwischen den von Ihnen definierten Werten (linke Seite) und den Werten, die online auf der Steuerung ausgeführt werden, können Sie die Werte wählen, die für die Lösung des Konflikts verwendet werden sollen.
|
Element |
Beschreibung |
|---|---|
|
|
Schreiben der Offline-Parameter auf die Online-Parameter (links nach rechts). 
|
|
|
Laden Sie die Werte, die online auf der Steuerung ausgeführt werden, in die Offline-Parameter (rechts nach links). 
|
Schaltfläche „Trigger‟
|
Element |
Beschreibung |
|---|---|
|
Schaltfläche |
Verwenden Sie diese Schaltfläche, um die Ergebnisse des aktuellen Parametersatzes zu testen.
|
Schaltfläche „DiagQuit‟
|
Element |
Beschreibung |
|---|---|
|
Schaltfläche |
Verwenden Sie diese Schaltfläche, um die Diagnosemeldungen zu beenden, beispielsweise im Fall einer ungültigen Konfiguration ohne Umschalten auf den Aufruf von SR_<Camera Name>. |
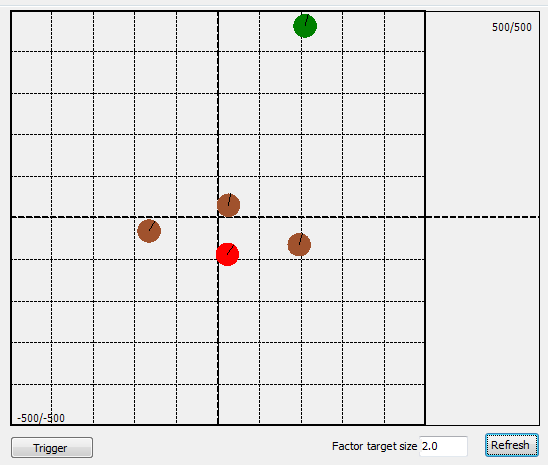
Factor Target Size
Die Größe der angezeigten Ziele sind vom Parameter Overlap radius oder dem Parameter Element step abhängig.
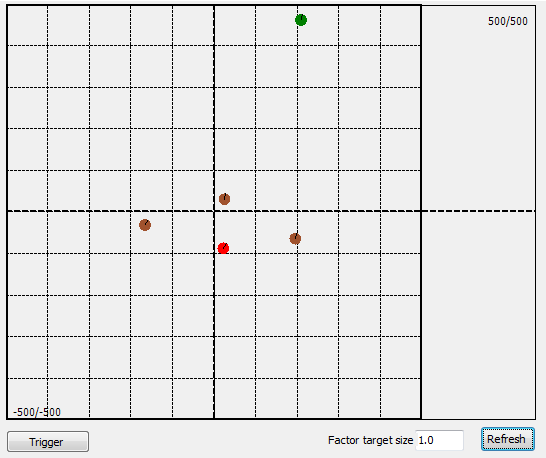
Um die angezeigten Ziele zu skalieren, können Sie die Option verwenden und auf klicken.
Status der erzeugten Ziele
Der Status bzw. die Diagnose der intern verwendeten FB_RandomTargetsGenerator und FB_SendVisionData wird angezeigt.
Wenn das Modul im (SR_<Camera Name>.RegisterLoggerPoint()) registriert ist, werden die Protokollmeldungen an den gesendet.