Conveyor Mode
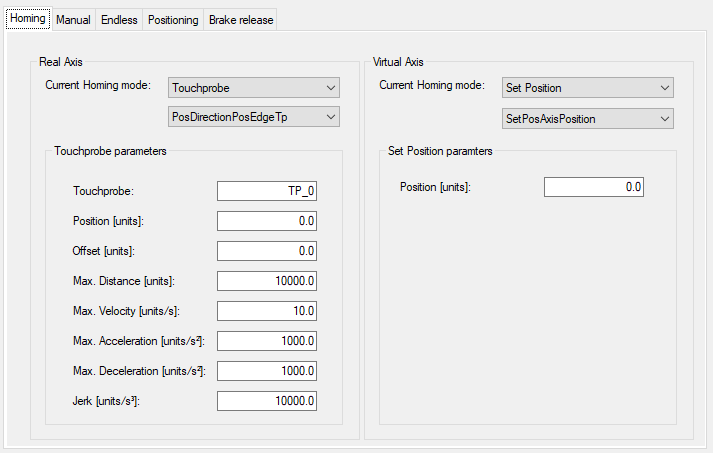
Registerkarte „Referenzierung“
Die Registerkarte ermöglicht die Auswahl und Parametrierung des Referenziermodus für eine (auf der linken Seite) und für eine (auf der rechten Seite).
Die Auswahl und Parametrierung des Referenziermodus für eine oder für eine erfolgt auf dieselbe Weise.
Alle Referenziermodi des werden unterstützt (siehe PD_AxisModule - Bibliothekshandbuch, AXM.ST_ModuleInterface.ST_Home).
/
|
Element |
Beschreibung |
|---|---|
|
|
Wählen Sie einen Referenziermodus aus (Einzelheiten siehe unten): Zusätzlich können verschiedene Parameter für den Referenziermodus ausgewählt werden. Für kann beispielsweise ausgewählt werden. |
|
|
Geben Sie die Parameter für den ausgewählten Referenziermodus ein. Beispielsweise |
Referenziermodi:
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeTp und PDL.ET_HomeTpMode.
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeIn und PDL.ET_HomeInMode.
Es gibt zwei Möglichkeiten für die Verwendung des Sensorwertes PDL.ST_HomeIn.i_xSensor:
-
Sie können die Eigenschaft SR_<ConveyorName>.xHomingSensor verwenden. Siehe Registerkarte .
-
Sie können einen Wert in die Struktur in der Methode Logic schreiben.
Die Eigenschaft und die Strukturvariable stSensor.i_xSensor sind mit einer OR-Bedingung verbunden.
-
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeLimitSwitch und PDL.ET_HomeLimitSwitchMode.
Es gibt zwei Möglichkeiten für die Verwendung des Sensorwertes AXM.ST_Main.i_xHwLimitPos/ i_xHwLimitNeg:
-
Sie können die Eigenschaft SR_<ConveyorName>.xHwLimitSwitchPos/ SR_<ConveyorName>.xHwLimitSwitchNeg verwenden. Siehe Registerkarte .
-
Sie können einen Wert in die Struktur in der Methode Logic schreiben.
Die Eigenschaft und die Strukturvariable stMain.i_xHwLimitPos/stMain.i_xHwLimitNeg sind mit einer OR-Bedingung verbunden.
-
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeTorque und PDL.ET_HomeTorqueMode.
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeMoveOnPos.
HINWEIS: Die Parameter i_xRotativeSystem und i_lrUserPeriod werden auf der Registerkarte festgelegt. -
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeSetPos und PDL.ET_HomeSetPosMode.
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeSetPos und PDL.ET_HomeSetPosMode.
-
Siehe das PD_PacDriveLib-Bibliothekshandbuch, PDL.ST_HomeWritePos.
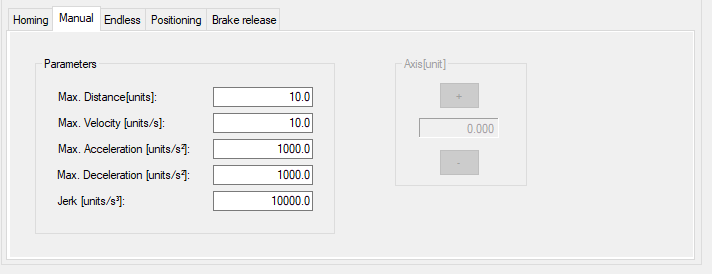
Registerkarte „Manual“
Die Registerkarte ermöglicht das Bearbeiten der Parameter für den manuellen Modus und hilft Ihnen dabei, die Achse manuell zu bewegen. Sie können die Achse bewegen, wenn das Modul online und der manuelle Modus aktiviert ist.
Für ausführliche Informationen zu den Parametern, siehe PD_AxisModule Bibliothekshandbuch, AXM.ST_Manual).
| WARNUNG | |
|---|---|
|
Element |
Beschreibung |
|---|---|
|
|
Bearbeiten Sie die Parameter für den manuellen Modus: Für ausführliche Informationen zu den Parametern, siehe PD_AxisModule Bibliothekshandbuch, AXM.ST_Manual). |
|
|
Klicken Sie auf die Schaltflächen (positiv / negativ), um sich entlang der Förderbandachse durch Steuerung der entsprechenden Antriebe zu bewegen (tippen). |
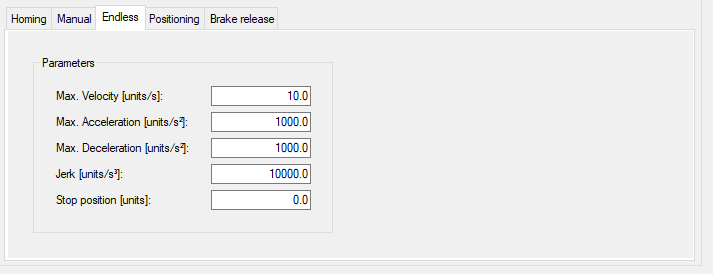
Registerkarte „Endless“
Die Registerkarte ermöglicht die Bearbeitung der Parameter für den Endlosbetrieb.
Für ausführliche Informationen zu den Parametern, siehe PD_AxisModule Bibliothekshandbuch, AXM.ST_EndlessFeed).
|
Element |
Beschreibung |
|---|---|
|
|
Bearbeiten Sie die Parameter für den Endlosbetrieb: Für ausführliche Informationen zu den Parametern, siehe PD_AxisModule Bibliothekshandbuch, AXM.ST_EndlessFeed). |
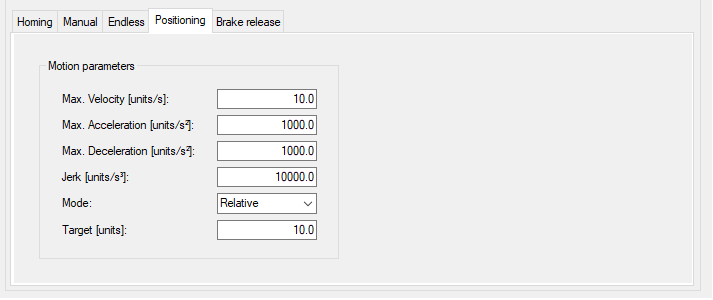
Registerkarte „Positioning“
Die Registerkarte ermöglicht die Bearbeitung der Parameter für den Positionierungsmodus.
Für ausführliche Informationen zu den Parametern, siehe PD_AxisModule Bibliothekshandbuch, AXM.ST_Positioning).
|
Element |
Beschreibung |
|---|---|
|
|
Bearbeiten Sie die Parameter für den Positionierungsmodus: Für ausführliche Informationen zu den Parametern, siehe PD_AxisModule Bibliothekshandbuch, AXM.ST_Positioning). |
Registerkarte „Brake Release“
Die Registerkarte unterstützt Sie beim Lösen/Aktivieren der Bremse einer Förderbandachse.
Sie können die Bremse steuern, wenn das Modul online und der Modus zum Lösen der bremse aktiviert ist.
Es wird nicht geprüft, ob der Motor mit einer Bremse ausgestattet ist oder nicht.
|
Element |
Beschreibung |
|---|---|
|
|
Die Anzeige zwischen den Schaltflächen und zeigt den Status der Bremse an. |